Jackal Integration

To attach custom hardware to Jackal, you will have to take care of mechanical mounting, electrical supply, and software integration. This guide aims to equip you with respect to these challenges.
Mechanical Mounting
When determining mechanical mounting, you can use the Standard square mounting pattern on the lid of the Jackal. At this time, the "PACS™" mounting system is not available for Jackal.
Mechanical, Standard
A standard Jackal is delivered with an 80 mm square mounting pattern of M5 threaded holes on its lid, which can be used for attaching external payloads. The mounting holes come with M5 screws pre-installed. You may mount your hardware directly onto the lid or you may design and mount a new plate to the lid and secure it to the lid using M5 screws.
Mechanical, PACS
While Jackal does not yet support PACS directly, the following kits may simplify your integration.
Electrical Integration
Except for bus-powered USB cameras, most payloads have separate leads for power and data.
Data Connections
Data connections may be brought through the hatch and connected directly to the internal computer. Both of Jackal's internal computer options support USB3 and Ethernet connectivity. With the performance computer, the PCIe slot may be used to supply Firewire, Thunderbolt, or additional USB3 ports, as necessary.
Additionally, the internal mounting area may be used for an Ethernet switch, when attaching multiple Ethernet payloads, or for a PoE power injector as required.
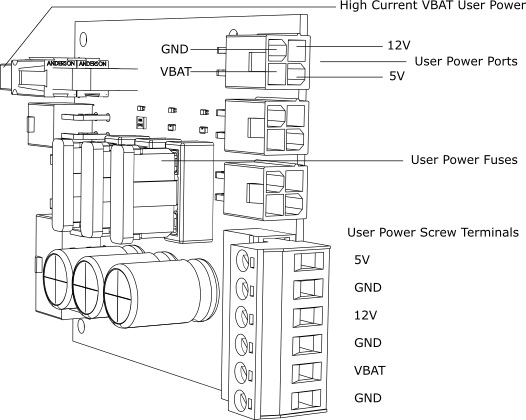
Connector Summary
The Jackal User Power Board (UPB) board provides a number of connections for power. These are summarized in the following table and described in more detail in the following sections.
- For the High Current VBAT User Power, terminate your payload's power lead with the appropriate terminals.
- For the User Power Ports, terminate your payload's power lead with the appropriate crimps and pins. for the four pin Molex connector. This option may be best if you are removing your payload from Jackal frequently.
- For the User Power Screw Terminals, pull out the black terminal block, and use a small screwdriver to securely attach power leads to it. Confirm voltage and polarity before reconnecting the terminal block.
| Port (see Figure) | MCU board connector | Mating connector | Crimp terminals | Crimping tool |
|---|---|---|---|---|
| High Current VBAT User Power | Anderson PP15/45 1327-BK (red) + 1327G6-BK (black) + Anderson PCB45 1336G1 (lower) + 1337G1 (upper) | Anderson PP15/45 1327-BK (red) + 1327G6-BK (black) | Anderson 262G2-LPBK (AWG 16-20) or 261G3-LPBK (AWG 10-14) | Anderson 1309G8 |
| User Power Ports | Molex 0039301040 | Molex 0039012040 | Molex 0507528200 (AWG 20-22) or Molex 0503518100 (AWG 22-28) | Molex 2002184900 |
| User Power Screw Terminals | Molex 39522-1006 | Molex 39520-0706 | N/A | N/A |
User Power Connections
Similar to the data connections, power leads may be brought through the hatch, and connected to the User Power Board. The following are available as user power:
- Unregulated VBAT power (25.6 V nominal, 16 A max), shared across the High Current VBAT User Power (16 A max), User Power Ports (8 A max per port) and the User Power Screw Terminals (15 A max)
- Regulated 12 V power (7 A max), shared across the User Power ports (7 A max per port) and the User Power Screw Terminals (7 A max)
- Regulated 5 V power (5 A max), shared across the User Power ports (5 A max per port) and the User Power Screw Terminals (5 A max).
Each User Power Port (Molex 0039301040) has a shared ground (GND) pin with a maximum current rating of 8 A. Ensure that the combined current draw for the VBAT, 12V, and 5V pins for the corresponding GND pin does not exceed 8 A.
MCU Debug LEDs
The Jackal MCU circuit board comes equipped with four LEDs controlled by Jackal firmware for debugging. If the system is working properly, these LEDs functions as follows:
- DBG1: toggles every 500 ms when main loop on MCU is running
- DBG2: not used in normal operation; LED should be off
- DBG3: not used in normal operation; LED should be off
- DBG4: not used in normal operation; LED should be off
Software Integration
ROS has a large ecosystem of sensor drivers, some of which include pre-made URDF descriptions and even simulation configurations. Refer to Sensors supported by ROS.
For the best experience, consider purchasing supported accessories from Clearpath Robotics for your robot, which will include simulation, visualization, and driver support.
Refer to the following for more details:
Support
Clearpath is committed to your success. Please get in touch with us and we will do our best to get you rolling again quickly: <support@clearpathrobotics.com>.
To get in touch with a salesperson regarding Clearpath Robotics products, please email <research-sales@clearpathrobotics.com>.
If you have an issue that is specifically about ROS and is something which may be of interest to the broader community, consider asking it on Robotics Stack Exchange. If you do not get a satisfactory response, please ping us and include a link to your question as posted there. If appropriate, we will answer on Robotics Stack Exchange for the benefit of the community.