Husky A300 User Manual

Important SAFETY INFORMATION
DANGER
DANGER indicates a hazardous situation which, if not avoided, will result in death or serious injury.
WARNING
WARNING indicates a hazardous situation which, if not avoided, could result in death or serious injury.
CAUTION
CAUTION indcates a hazardous situation which, if not avoided, could result in minor or moderate injury.
The top priority of Clearpath Robotics is the safety of its users. Clearpath Robotics produces high power and fast-moving pieces of machinery that potentially could cause serious injury, including death, if improperly used or maintained. In order to inform our users of some of these risks, throughout Clearpath Robotics documentation you will see safety messages corresponding to either a DANGER, WARNING, or CAUTION level as shown above.
WARNING
Observe all safety warnings, instructions, illustrations and specifications provided with this automated mobile robot.
Failure to do so may result in fire, equipment damage, property damage and/or personal injury, up to and including death.
The Husky A300 may present risks to users even during normal operation. All users should familiarize themselves with the potential hazards of the system so they can anticipate and avoid them.
The hazards currently identified are outlined below.
Fire / Explosion
DANGER: Fire
Never use the Husky A300 robot in an environment outside the specified temperature and humidity constraints.
The Husky A300 robot contains lithium iron-phosphate chemistry batteries, which can create a fire hazard if used improperly.
DANGER: Explosion
Do not operate Husky A300 in explosive atmospheres, such as in the presence of flammable liquids, gases or dust.
Husky A300 can create sparks which may ignite the dust or fumes.
Crushing / Impact / Pinching
DANGER: Crushing / Impact
Do not operate Husky A300 near people, ladders, vertical drops or stationary racks. Caution and care shall be taken when operating the robot for demonstration purposes to the public that may have vulnerable persons (i.e. children, elderly, etc.).
The base Husky A300 robot is not equipped with personnel detection or obstacle avoidance systems. This may present crush or impact hazards.
WARNING: Pinch / Crush
Keep hands, feet, and other objects clear of the Husky A300 at all times.
Objects can be pinched between the Husky A300 and other fixtures in the environment or between the Husky A300 wheels and the Husky A300 frame or payloads.
WARNING: Crushing / Impact
Ensure that you follow all guidance for Husky A300 regarding allowable slopes, allowable payload mass, and allowable payload location. Refer to Important System Limits for additional information on the robot stability cone.
Husky A300 can tip over (forward, backward, or sideways) if subjected to slopes or vertical drops outside the allowable range, which can lead to crushing or impact hazards.
WARNING: Crushing / Impact
Always use chock blocks on the wheels when powering off the robot.
When Husky A300 is left unpowered on a slope or ramp, it can roll down the slope/ramp, which can lead to crushing or impact hazards.
WARNING: Crushing / Impact
When Husky A300 is being operated on an incline, ensure that there are no objects in the environment that will be impacted by a free-rolling robot.
When Husky A300 is in an Emergency Stop state on a slope or ramp, it can roll down the slope/ramp, which can lead to crushing or impact hazards. Consider the slope/range angle, payload mass and other Important System Limits.
CAUTION
Never cross into the path of Husky A300 or place obstacles on its path.
These obstacles may not be detected in time and could result in an impact.
CAUTION
Always keep away from Husky A300 in the docking and charging areas.
Obstacle detection may be reduced in these areas and could result in an impact.
CAUTION
Always keep away from Husky A300 in narrow aisles and corridors.
Reduced clearance in these areas and could result in an impact.
CAUTION
Always keep loose clothing away from Husky A300 along with its accessories, attachments, and payloads.
Using an Emergency Stop button is the only acceptable manner of interacting with Husky A300 while it is being operated. This reduces entrapment.
CAUTION
Always tie up long hair and avoid loose jewellery when working aroung Husky A300.
This reduces entrapment.
Tripping
CAUTION
Ensure that Husky A300 is always parked in a location away from walkways when not in use.
Husky A300 can present a tripping hazard if left in walkways.
CAUTION
Remain alert if present in the Husky A300 operating area.
Husky A300 can be anywhere in the operating area at any time and may pose a tripping hazard even when not in motion.
Personal Protective Equipment
CAUTION
Always wear gloves, preferably nitrile gloves, while performing maintenance on the robot.
Internal maintenance on Husky A300 may expose the user to chemicals in thermal paste or thread locking adhesives.
CAUTION
Always wear safety footwear (ie. steel toe) while near Husky A300.
Husky A300 may move unexpectedly.
CAUTION
Always wear hearing protection while near Husky A300.
Husky A300 may emit noise up to 80 dB.
Maintenance
WARNING
Always follow the proper Lock-Out Tag-Out Procedure for Husky A300 when completing inspections or maintenance.
Access to live voltage inside Husky A300 may occur if the proper Lock-Out Tag-Out procedure is not followed. This may result in electric shock.
CAUTION
Maintain Husky A300.
Check for misalignment or binding of moving parts, breakage of parts and any other condition that may affect Husky A300's operation. If damaged, have Husky A300 repaired before use. A poorly maintained Husky A300 may result in a risk of shock, fire and/or serious injury.
CAUTION
Never perform maintenance on Husky A300 unless authorized to do so by Clearpath Robotics.
Maintenance procedures not outlined in either this document or the maintenance manual can only be performed by a Clearpath Robotics Authorized Personnel.
CAUTION
Have your Husky A300 serviced by a qualified repair person using only identical replacement parts.
This will ensure that the safety of Husky A300 is maintained.
CAUTION
Never service damaged battery packs.
Service of battery packs should only be performed by the manufacturer or authorized service providers.
CAUTION
Never use cleaning agents that could damage plastic parts.
Certain cleaning agents and solvents damage plastic parts. Some of these are: gasoline, carbon tetrachloride, chlorinated cleaning solvents, ammonia and household detergents that contain ammonia.
CAUTION
Always ensure Husky A300 is in an Emergency Stop state or shut down completely prior to moving it manually.
Husky A300 may move unexpectedly.
CAUTION
Never push Husky A300 at speeds above 2 m/s when moving it manually.
This may cause damage to the motors.
CAUTION
Always power off Husky A300 and set the Battery Breaker to the OFF position prior to performing maintenance.
Electrical shock may occur when accessing the interior of the Husky A300.
CAUTION
Always place Husky A300 at a suitable height when working in or around Husky A300.
Bend at the knees when working on the robot at ground level to avoid fatigue and injury.
CAUTION
Always have Safety Data Sheets on hand.
These may be required if unexpected damage occurs to an internal component such as a battery. Refer to the battery Safety Data Sheet.
Operating Conditions and Environment
CAUTION
Use Husky A300 in accordance with these instructions, considering the working conditions and the work to be performed.
Use of Husky A300 for operations different from those intended could result in a hazardous situation.
CAUTION
Perform a site-specific risk assessment.
Additional items may need to be addressed based on the site-specific operating environment.
CAUTION
Never attempt to have Husky A300 climb curbs higher than 150 mm, operate near overhanging obstacles, or drive across gaps or depressions in the ground more than 200 mm deep, such as the top of stairs, at a cliff edge, or at large potholes.
This may result in damage to the robot drive systems, attachments, or accessories.
Payload Maximums
Husky A300 supports a specific maximum payload. Husky A300's maximum payload changes when attachments or accessories (including additional batteries) are added because of the weight of the attachments and accessories. In the case of a Husky A300 with attachments or accessories, the weight of any additional payloads when combined with the weights of any attachments and accessories should not exceed the maximum payload documented on the Nameplate.
CAUTION
Never load a Clearpath Robotics product with more weight than is specified by the current signage on Husky A300.
Loading Husky A300 with accessories, attachments, or payloads whose combined weight exceeds the maximum payload specified on the Nameplate will prevent Husky A300 from correctly determining stopping distances and may also damage the robot, attachment, accessory, or payload.
Disclaimer
The information found within this documentation is subject to change without notice. This document may be periodically reviewed and revised in the future. Clearpath Robotics assumes no responsibility for any errors or omissions that may appear in this document. In no event shall Clearpath Robotics be liable for any costs or damages arising from the use of this document or the hardware and software described within. The reference documents listed in this manual shall be applicable at the latest revision in effect.
While Clearpath Robotics does its best to inform its users of potential risks, it is impossible to provide an exhaustive list of all possible hazards in your environment.
It is the responsibility of the user to be familiar with all applicable safety standards and ensure that the hardware, software, and/or services delivered by Clearpath Robotics (collectively referred to as the "Product") are maintained and operated in a safe manner, in a suitable environment, and in accordance with the recommended maintenance requirements prescribed by Clearpath Robotics.
Without limiting the foregoing, it is the user's responsibility to ensure that personnel operating the Product are adequately trained and comply with all laws, regulations, codes, and safe practices, including health and safety and workers' compensation laws, applicable to the user's activities and its ownership, possession, and use of the Product. Modification, removal or addition of components, or changes to the functionality or operation of the Product in any way, except as expressly authorized by Clearpath Robotics, may jeopardize the safety of the Product. If at any time you have any questions or concerns regarding the safe operation of your Clearpath Robotics product, contact Support.
If at any time you have any questions or concerns regarding the safe operation of your Clearpath Robotics product, contact Support.
Intended Use
Husky A300 is intended for use in:
- indoor and outdoor research laboratories and light industrial environments for inspection, materials transport, and manipulation;
- environments free of vertical drops greater than 200 mm;
- environments free of fast-moving people or vehicles;
- environments free of glass or transparent plastic floors or walls;
- temperatures between -20°C and +40°C;
- environments free of open water or other liquids deeper than 130 mm;
- environments free of grades greater than 15°.
The system is intended to be operated by trained personnel familiar with mobile robotic technology. It is intended to be monitored constantly by those personnel during operation.
The system is intended to be operated around trained personnel familiar with the hazards that the system presents.
The system is intended to be operated in the as-furnished condition, without additional equipment, payload or passengers.
Introduction
Husky A300 is a rugged and easy-to-use unmanned ground robot for research applications, rapid prototyping, and deployments. It is available both as a base platform and as an autonomous mobile platform (AMP).
- Read all instructions before using this product.
- Familiarize yourself with the System Specifications.

Risk Reduction
Despite the safety features Clearpath Robotics has put into place, the Husky A300 is heavy and capable of moving quickly. The best way to ensure protection of life and equipment around the Husky A300 is to keep a safe distance from it and pay attention to the status lights and auditory warnings to anticipate the robot's intentions. If work is being performed on the charge system, follow local Lock-Out Tag-Out procedures for safety.
See Basic Usage for more detail.
Safety System Functionality
Two methods are used to reduce the system risk:
- The robot is equipped with front and rear Emergency Stop buttons within easy reach of robot.
- The robot is equipped with an electrical braking system that reduces and limits the speed of the robot when engaging the Emergency Stop.
The safety of each Clearpath Robotics robot needs to be evaluated in the context of the installation where it is used. Environmental and process factors in each installation will ultimately govern the risk of injury resulting from the interaction of people or equipment in the operating environment with the robot.
General Warnings
Husky is a rugged and high-performance robot. For the safety of yourself and others, always conduct initial experiments and software development with the robot raised off the ground. Place a wooden crate, a set of sawhorses, a sturdy storage tub, or any other solid flat structure having a height greater than 150 mm under Husky to keep the wheels clear of the ground ("up on blocks").
When starting out, favour slower wheel speeds. Husky's control loops can accurately maintain velocities as low as 0.1 m/s. Operating at such speeds will give you more time to react if things don't go quite as you expect.
When Husky is operating, keep clear of the wheels.
Emergency Stop Buttons
WARNING
Ensure the two Emergency Stop buttons are accessible at all times. Avoid mounting payloads that extend over the front or rear of Husky and would occlude the Emergency Stop buttons.
The Emergency Stop function allows a person in the physical vicinity of the robot to disconnect drivetrain power. Power supply to Husky's motor drivers is enabled by a normally-open relay, which is closed in series with the Emergency Stop switch. This Emergency Stop system is intended for use in emergency situations only. The Emergency Stop system should not be used as the means of controlling robot motion during regular operation. Refer to Important System Limits for more details on robot behaviour when engaging the Emergency Stop system on an incline.
When in Emergency Stop mode, the status lights will illuminate red and Husky will not drive. The commands received during Emergency Stop mode are not buffered; Husky will always act on the latest commands received. This means that if the commands are stopped before the stop is released, the Husky will not move. If the commands are continued, Husky will move at the speed commanded once the stop is released and motion is re-enabled.
This Emergency Stop function can be asserted by pressing either of the red stop actuators present at the front and rear of the Husky, as shown in the following figure. The Emergency Stop function can be reset by twisting all depressed actuators until they return to their extended positions, then pressing the Safety Restart button. The robot may begin moving again immediately after the Safety Restart button has been pressed.
Wireless Emergency Stop (Optional Kit)
In addition to the onboard Emergency Stop buttons, the system may include an optional wireless Emergency Stop kit. When the kit is included, it allows a person who is physically separated from the robot to halt its motion and prevent re-initiation of motion.
To assert the stop function:
- depress the red push-button actuator on the side of the provided controller.
To reset the stop function:
- twist the depressed red actuator until it returns to its extended position;
- press and hold the black start button on the side of the controller until the green light appears (about 1 second), then release;
- wait 1 second;
- press and release the black start button on the side of the controller.
The Wireless Emergency Stop is asserted automatically if the robot is not able to communicate wirelessly with the controller. This is to ensure that the stop function does not become unexpectedly non-operational as a result of robot or operator motion, interference, atmospheric conditions, depleted battery, etc. The controller must be powered and within range of the mobile robot to communicate.
The Wireless Emergency Stop is intended for use in emergency situations and should not be used as the means of controlling robot motion during regular operation.
The Wireless Emergency Stop (but not the onboard Emergency Stop buttons) may be disabled by means of a key switch described further at Wireless Emergency Stop Bypass. This is to allow the robot to be operated at higher risk while, for example, the controller battery is dead, out of range, or not accessible.
Operation of the mobile robot while the Wireless Emergency Stop is disabled is not recommended. The system deployer/operator assumes all responsibility for injury to persons or animals, or damage to property, arising from the inability to remotely stop the motion of the robot due to the use of this override.
Electrical System
Husky is powered by two or more 24 V LiFePO4 batteries, similar to the type found in electric wheelchairs, golf carts, and other devices. Depending on the system configuration, Husky's batteries are capable of delivering over 3000 W of power. This gives Husky's motors their great performance; however, it is also enough power to cause severe bodily harm. Please observe the following precautions:
- Charge the battery only with the charger provided by Clearpath Robotics.
- Please dispose of the batteries properly.
Lifting and Transport
See Moving an Unpowered or Disabled Husky for details.
Performance Considerations
Included in Husky are native software checks and limits to protect the robot.
Diagnostics Monitoring
However, it is recommended to monitor the system's status during usage with the /status and /diagnostics topics.
These topics provide useful information regarding voltages, currents, temperatures and general health of the system.
Important System Limits
Thermal Limits
Husky A300 is equipped with temperature sensors throughout the robot, which are used to monitor temperatures and determine fan speeds for proper cooling. In addition, if the robot is approaching its critical thermal limits, system throttling may occur. Monitoring these fields over longer periods of operation will allow you to ensure that you are not putting excessive wear on Husky's motors and other components.
| Sensor | ROS Topic¹ | Message Field | Lower Critical Limit (°C) | Upper Critical Limit (°C) | Notes |
|---|---|---|---|---|---|
| Motor [1-4] Temperature | /a300_00000/platform/motors/status | drivers[0-3].motor_temperature | -10 | 100 | Does not affect fan speed |
| Motor Driver [1-4] MCU Temperature | /a300_00000/platform/motors/status | drivers[0-3].mcu_temperature | -20 | 80 | |
| Motor Driver [1-4] PCB Temperature | /a300_00000/platform/motors/status | drivers[0-3].pcb_temperature | -20 | 80 | |
| Battery [1-6] Temperature | /a300_00000/bms/battery_state_[1-6] | temperature | -20 | 60 | Charging must occur above 0°C |
| MCU Temperature | /a300_00000/platform/mcu/status/temperature | temperatures[CC01_MCU] | -20 | 80 | |
| Fan Controller Temperature | /a300_00000/platform/mcu/status/temperature | temperatures[CC01_FAN[1-4]] | -20 | 80 | |
| 5V Inductor Temperature | /a300_00000/platform/mcu/status/temperature | temperatures[5V_INDUCTOR] | -20 | 80 | |
| Main Ground Lug Temperature | /a300_00000/platform/mcu/status/temperature | temperatures[MAIN_GND_LUG] | -20 | 80 | |
| 24V DC/DC Temperature | /a300_00000/platform/mcu/status/temperature | temperatures[24V_DCDC] | -20 | 80 | |
| 12V DC/DC Temperature | /a300_00000/platform/mcu/status/temperature | temperatures[12V_DCDC] | -20 | 80 |
¹ Adjust the /a300_00000 field with the serial number of your robot.
Current Limits
The maximum current draw of the system is limited by the output of the batteries. The maximum continuous output for the 2-battery, 4-battery, and 6-battery configurations is 60 A, 120 A, and 150 A, respectively. Higher outputs are possible for short periods of time.
Husky A300's motors are rated to draw 17 A continuous, but they will spike to several times higher than this, particularly when traversing rough terrain and when turning on the spot. To reduce current draw, consider commanding wider-radius turns from your control software.
Stability Limits
WARNING
Always ensure that the centre of mass of the system will not result in tipping hazards in the target environment.
The end user needs to perform calculations to confirm that the combined centre of mass of the system (robot + payload) will not result in tipping hazards in the target environment (based on slopes, terrains, etc). To ensure safe operation in the target environment, suitable safety margin should be applied to the minimum limits outlined below.
When no payload is present, refer to the System Specifications for the safe operating limits.
WARNING
Always account for variations in the target environment when determining safe operating conditions.
The presence of rain, snow, or ice can cause variations in the target operating environment that result in changes to the safe operating limits.
The image below shows the centre of mass for a robot with two batteries.
The image below provides an example stability cone for Husky A300 (2-battery configuration). It shows the location in which the centre of mass of a 100 kg payload must reside to avoid tipping while being able to operate at inclines up to 30 degrees, side slopes up to 30 degrees, and accelerations/decelerations up to 4 m/s². A safety factor should be applied so that the centre of mass is well inside the defined stability cone, especially when operating: on uneven surfaces, on large inclines or side slopes, in varying friction environments (ice, sand, etc), with low tire pressure and high tire deflection, and worn treads.
The images below show the centre of mass and stabililty cone for a 2-battery configuration. Appropriate adjustments should be made for 4-battery and 6-battery configurations.
Emergency Stop Braking Limits
When Husky A300 has its Emergency Stop engaged, an electrical (resistive) brake is applied to reduce the speed of the robot. The payload mass and the incline on which the robot is operating will affect the terminal speed of the robot when the Emergency Stop is engaged.
WARNING
Always confirm terminal speeds in the target environment.
The performance values outlined below can be affected by various environmental factors such as terrain type and should be treated as a reference only. Exact limits should be determined by the user in the target operating environment. It is the responsibility of the user to ensure that no hazards are present in the the target operating environment.
| Payload Mass | Incline | Terminal Speed |
|---|---|---|
| 0 kg | 0° | 0 m/s |
| 100 kg | 0° | 0 m/s |
| 0 kg | 15° | 0.5 m/s or less |
| 100 kg | 15° | 1.25 m/s or less |
Recommended Safe Work Procedures
Clearpath Robotics recommends the following procedures be followed to reduce the likelihood of harm.
- Maintain a safe distance of at least 10 m from the robot whenever possible.
- Never assume that the robot can be reliably stopped on command.
- Assert a stop using the remote stop device (if present) before approaching the robot.
- Never place the remote stop device (if present) on or inside the robot.
- Always be vigilant around the robot, even when a stop is asserted.
- Perform no maintenance or troubleshooting on the robot without training and familiarisation.
- Follow electrical safety best practices when working with electrical systems and components.
- Disconnect battery using main disconnect of the robot before working inside robot.
- Wear personal protective equipment including high-visibility clothing, head and eye protection while operating, observing or working on the robot.
- Never climb on or ride the robot.
- Never lie on the ground under or near the robot.
- Avoid operating the robot on slopes and grades.
- Never stand downhill of the robot.
- Operate the robot at the lowest speed possible.
- Never attempt to defeat a safety function for any reason.
- Chock the robot's wheels when the robot will be stationary for more than a few seconds.
- Never work on the robot while it is on a slope.
- Replace fuses only with identical product from specified manufacturer.
- Discontinue use and contact Clearpath Robotics support at the first sign of strange robot behaviour.
- Keep tools and loose parts away from electrical components and out of the robot's bays.
- Check the functionality of stop systems on a regular basis, including before and after each use.
In addition, while lidars and cameras used on Husky A300 meetin Class 1 laser requirements, it is not recommended to look directly into these sensors while they are active, despite the risk being low.
In Case of a Collision
In case of a collision:
- Stop the robot by pressing a red Emergency Stop button on the robot or an equipped attachment.
- Is anyone hurt? Administer first aid immediately. Seek medical attention if necessary. Follow workplace injury and accident reporting procedures.
- Document the incident.
- Note the time and place.
- Note which robot was involved.
- Interview any witnesses.
- Take photos or make a drawing.
- Assess the state of the robot.
- Visually inspect the robot for damage and take photos of any damage found.
- If there is no visible damage, observe the robot after it returns to service.
- If any irregularities or differences in its behavior are observed, remove the affected robot from service and contact Support. If the damage is extensive, wait for communication from Clearpath Robotics before returning the robot to service.
System Overview
System Specifications
| Specification | Measurement |
|---|---|
| Dimension, Length | 990 mm |
| Dimension, Width | 698 mm |
| Dimension, Height | 381 mm |
| Track Width | 562 mm |
| Wheelbase Length | 512 mm |
| Ground Clearance | 139 mm |
| Mass | 80 kg |
| Maximum Payload¹ | 100 kg |
| All-terrain Payload² | 50 kg |
| Speed, Maximum³ | 2.0 m/s |
| Climb Grade⁴ | 30 ° |
| Traversal Grade / Sideslope | 30 ° |
| Operating Temperature⁵ | -20 °C to 40 °C |
| Storage Temperature | -20 °C to 60 °C |
| Operating Relative Humidity | 0 to 85% non-condensing |
| Operating Time, Average⁶ | 4 hours (2-battery) or 8 hours (4-battery) or 12 hours (6-battery) |
| Operating Time, Standby | 12 hours (2-battery) or 24 hours (4-battery) or 36 hours (6-battery) |
| Battery | 40 Ah @ 25.6 V (2-battery) or 80 Ah @ 25.6 V (4-battery) or 120 Ah @ 25.6 V (6-battery), LiFePO4 |
| Standard Battery Charger | 10 A; short-circuit, over-current, over-voltage and reverse voltage protection |
| Charge Time⁷ | 3-4 hours (2-battery) or 7-8 hours (4-battery) or 8-10 hours (6-battery) |
| User Power | 12 V @ 10 A, 24 V @ 5 A, VBAT @ 5 A Optional expansion: VBAT @ 40 A |
| Environmental | IP54 |
¹ Continuous operation on relatively flat terrain with wide turns.
² Robot climbing 30° grade with high-mounted payload, or turning in place in high-friction conditions.
³ Maximum speed should be limited to 1 m/s in off-road conditions when the payload exceeds 50 kg.
⁴ See also Important System Limits for additional considerations related to slopes.
⁵ Robot must be powered on at a minimum temperature of 0 °C.
⁶ Based on 33% driving at 2 m/s with 50 kg payload on level ground and 67% idle.
⁷ Based on standard battery charger; fast chargers are available.
System Architecture
Husky is built around a computer running Ubuntu (Intel-based computer or Jetson-based computer), paired with a 32-bit microcontroller unit (MCU). The MCU handles low-level hardware functions such as power supply control, light control, screen control, and hardware monitoring. The communication channel between the MCU and computer is an Ethernet connection.
Components Overview
Exterior Features
The base Husky exterior is shown below and includes:
- 1: Chassis
- 2: Wheels and motors
- 3: User payload area, including cable passthrough ports
- 4: Front and rear bumper bars
- 5: Status display
- 6: Status lights
- 7.1: Power Button
- 7.2: Emergency Stop Restart Button
- 8: Protected Access Panel (Battery Breaker, battery charge port, HDMI/USB/Ethernet debug ports, wireless Emergency Stop bypass)
- 9: Airflow intake (front) and exhaust (rear)
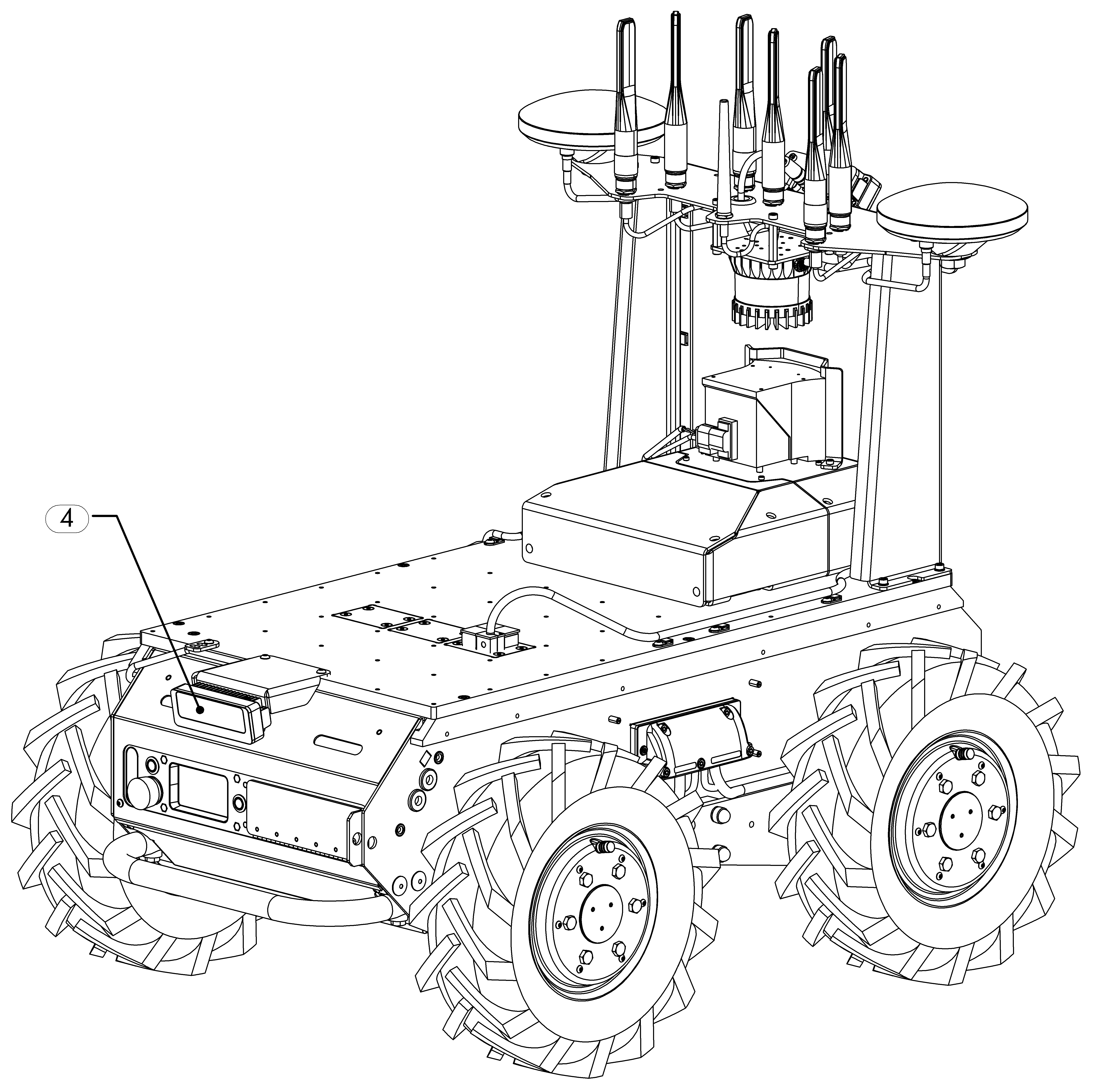
The Husky AMP extends the base Husky by adding the following as shown below:
- 1: Sensor tower
- 2: GPS antennas
- 3: Wi-Fi and/or LTE/5G antennas
- 4: Front and rear driving cameras
- 5: Obstacle detection sensor(s)

Chassis
The chassis contains the robot's batteries, electronics, and cooling systems. It is an IP54-rated enclosure.
Wheels and Motors
Husky is equipped with four wheels, each with its own motor. Power and control cables connect the motors to the chassis internals.
User Payload Area
Additional payloads such IMUs, lidars, cameras, GPS, manipulators and many more can be integrated with Husky, either as part of your Husky purchase or installed after receiving your Husky. You can find a list of supported packages and related documentation for payloads in this documention portal, under the following.
In addition, refer to Husky Integration for details on how to integrate your own payload or how to integrate a payload kit from Clearpath Robotics. Each payload kit that ships from Clearpath Robotics comes with a custom mounting bracket and cabling for easy attachment to Husky.
Front and Rear Bumper Bars
The front and rear bumper bars not only offer protection for Husky, they can be used for a two person lift when moving the robot short distances when there is no payload. Refer to Moving an Unpowered or Disabled Husky for details on moving Husky longer distances or when there are payloads.
Status Display
Husky is equipped with an electronic paper display that provides details on the robot's status.
At present, it shows the robot's remaining battery capacity. Additional status will be added in a future release.
Status Lights
Husky includes four status lights, one on each corner of the chassis. These lights
indicate the system status according to the table below. In addition, when in the
"Idle" and "Driving" states, the status lights can be commanded from ROS to display
indications from autonomy or other higher-level software by publishing to
the /a300_00000/platform/cmd_lights topic (adjusting for your Husky's serial number).
| System State (lowest to highest priority) | Light Output | Description |
|---|---|---|
| Light Control Fault (or boot failure) |  | The MCU is not in contact with the computer. This condition will be seen briefly on startup while robot's computer is booting up. If it persists, or is seen after initialization, either the base node on the computer has crashed, the network switch has failed, or a serious MCU error has occurred. If you suspect one of these conditions, please contact support. |
| Battery Fault |  | An error has been detected with the battery. Please contact support. |
| Motor Fault |  | An error has been detected a the motor or its controller, with the flashing light corresponding to the motor with the fault (eg. front right motor fault shown). Please contact support. |
| Motors Overheated |  | One or more motors are overheated. Allow the system to cool down before attempting to drive again. If the issue persists, please contact support. |
| Motors Throttled |  | Motor output has been reduced as one or more motors are beginning to overheat. Drive at reduced speeds or allow the system to cool down before attempting to drive again. If the issue persists, please contact support. |
| Charged |  | The robot's batteries are charged fully. Shore power is available for the robot to operate (excluding drive motors). |
| Charging (wired or wireless) |  | The robot's batteries are being charged, either from the wired/manual charger or the wireless charger. This also provides shore power for the robot to operate (excluding drive motors). |
| Emergency Stop Engaged |  | Emergency Stop mode is engaged. To disengage, twist both red mushroom buttons on the robot to ensure that they are unlatched and press the Safety Restart button. |
| Needs Safety Restart (after Emergency Stop) |  | The Emergency Stop buttons have been disengaged but the Safety Restart button still needs to be pressed to resume driving. |
| Low Battery |  | The robot's batteries are in a low charge state. Connect the robot to a charger. |
| Driving |  | The robot is driving (normal operation). |
| Idle |  | The robot is idle (normal operation). |
Buttons
Emergency Stop Buttons
The Husky is equipped with two Emergency Stop buttons, one at the front and one at the rear. Pressing either of these buttons removes power from the drivetrain. To clear the stop condition, all Emergency Stop buttons must be disengaged and the Safety Restart Button must be pressed. Refer to Emergency Stops for more details.
Safety Restart Button
To clear the stop condition, all Emergency Stop buttons must be disengaged and the Safety Restart Button must be pressed. Refer to Emergency Stops for more details.
Pressing the Safety Restart Button will have no effect when not in the stop condition or when one or more Emergency Stop buttons are engaged.
Power Button
The Power button is used to power the robot on and off. From the "OFF" state, pressing the button will cause the robot to power on. From the "ON" state, pressing the button will cause the robot to power off. Note that the Power button has no effect when the Battery Breaker is in the "OFF" position, unless a charger is connected to the robot.
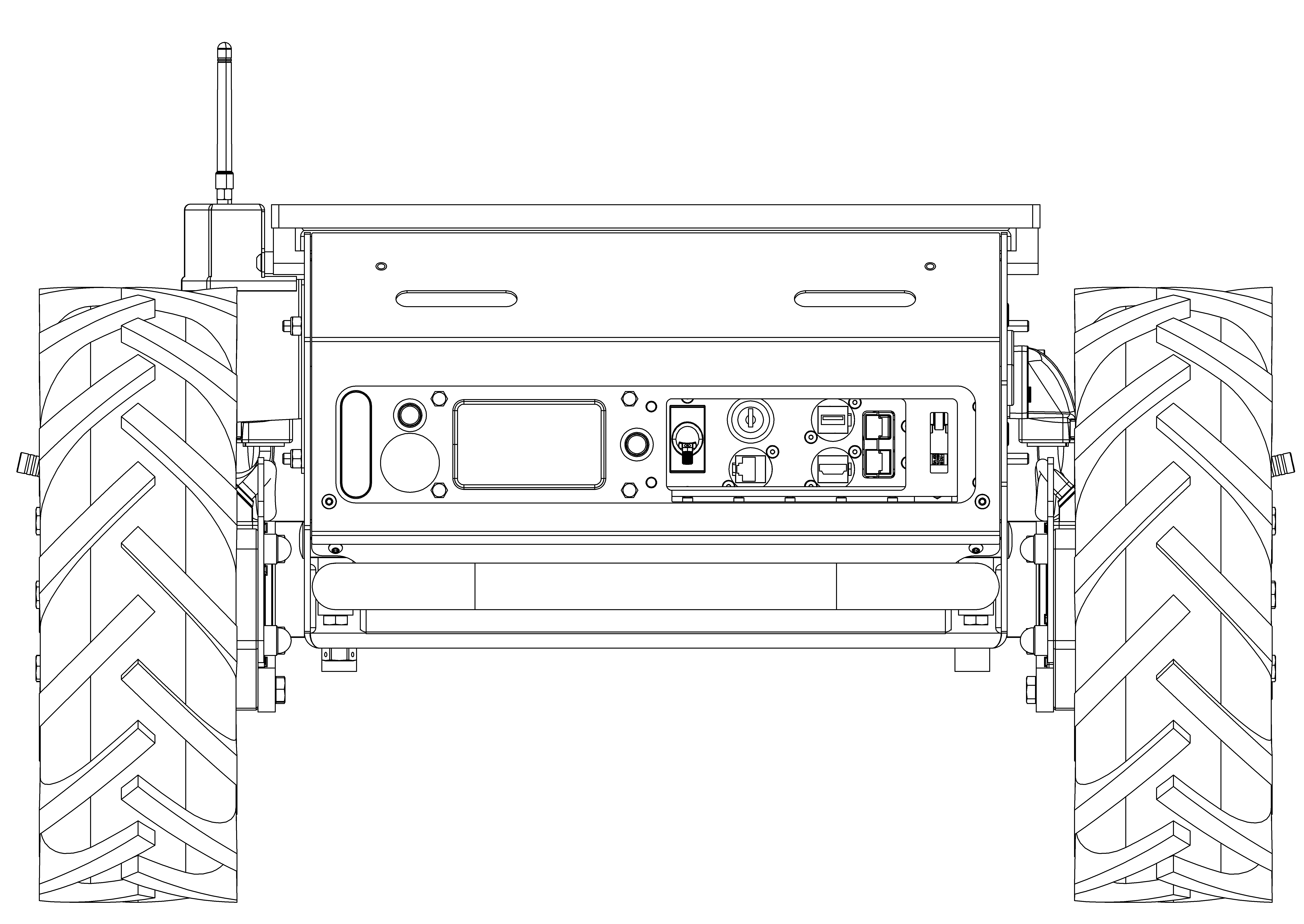
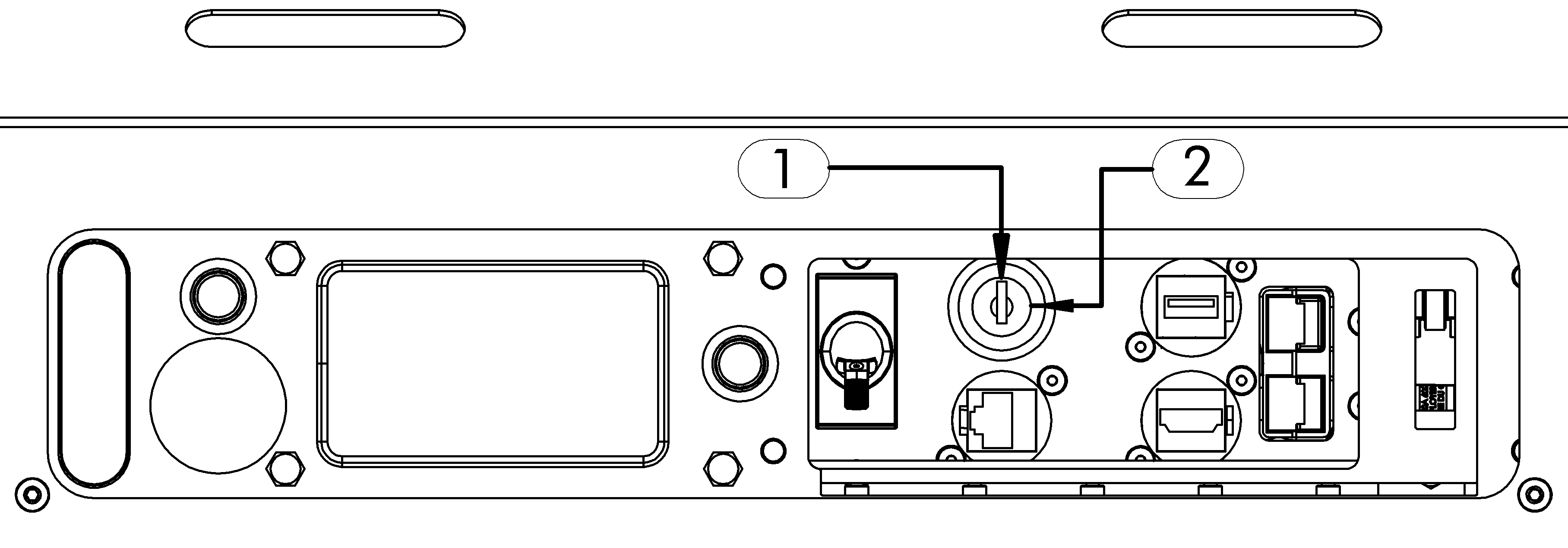
Protected Access Panel
The rear of the robot has an access panel, protected by a Lock-Out, that contains the Battery Charge Port, Battery Breaker, Debug Ports, and Wireless Emergency Stop Bypass. Opening the access panel cover puts the robot into a stop condition to prevent the robot from driving while cables may be connected. To clear the stop condition, close the access panel cover and press the Safety Restart Button.
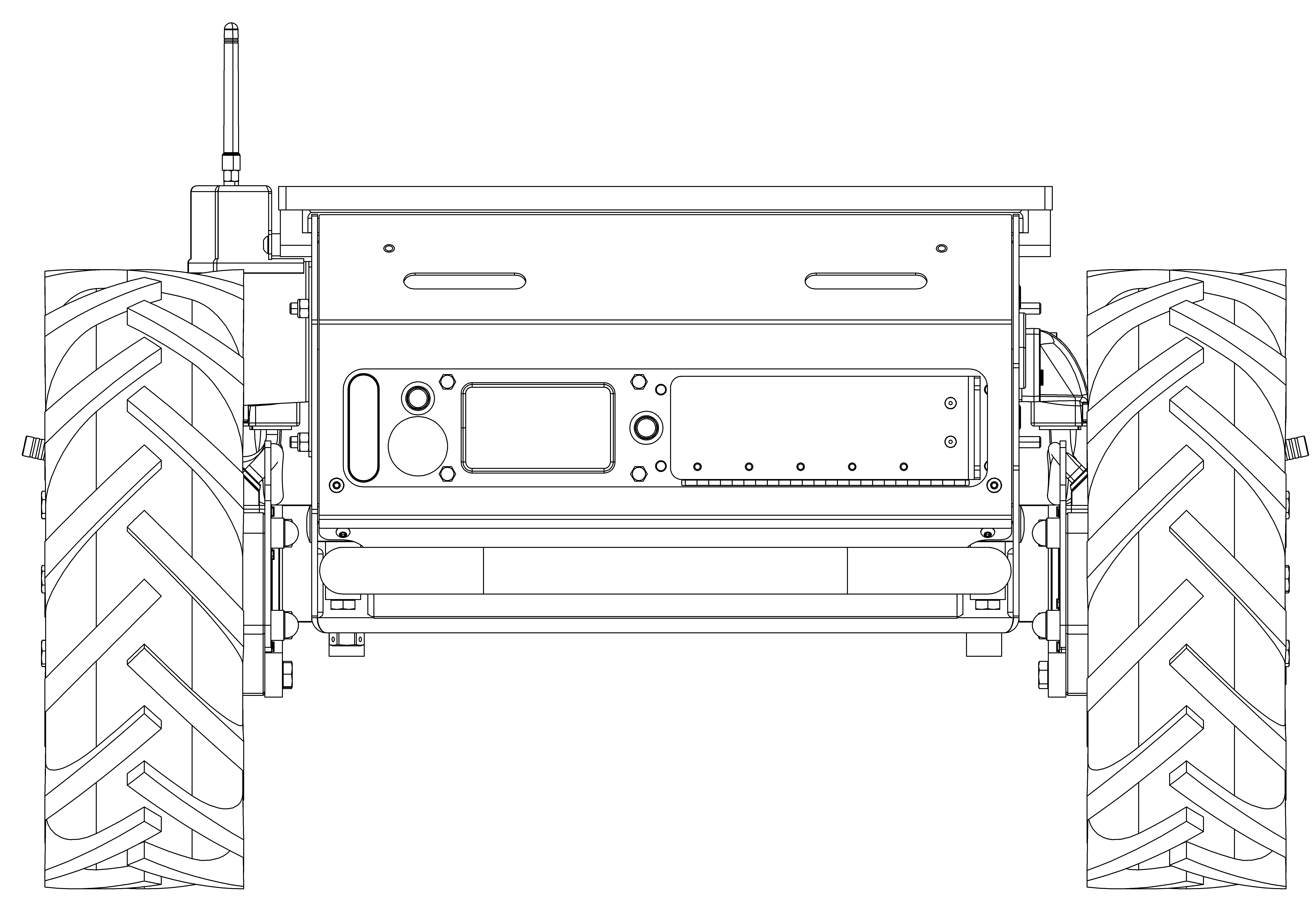
Lock-Out
When equipped with a lock, the Lock-Out prevents access to the Battery Breaker, Battery Charge Port, and Debug Ports. See Lock-Out Tag-Out for additional details.
Battery Breaker
When the breaker is in the "OFF" position, the Battery Breaker disconnects the internal batteries from the rest of the robot's systems. In this position:
- the Power Button can be used to turn the robot on/off only if a charger is connected;
- the robot will be off (unpowered) if no charger is connected and any Power Button presses will have no effect.
When the breaker is in the "ON" position:
- the Power Button can be used to turn the robot on/off;
- the robot can be charged (manual and wireless charger options), regardless of whether the robot is powered on or off.
Husky ships with the breaker in the "OFF" position to prevent battery drain during shipping.
Battery Charge Port
The charger included in your Husky shipment can be used to charge the robot's internal batteries by connecting it to the Battery Charge Port. Refer to Charging for additional information on charging the robot's batteries.
The charger also functions as "shore power" and may provide power to the robot indefinitely while connected, up to the maximum output current of the charger. If total system power draw is above the output current of the charger, which may occur with certain custom payloads, the batteries will continue to discharge even when a charger is connected.
Debug Ports
The robot is equipped with a Gigabit Ethernet port, a USB 3.0 (Type A) port, and an HDMI port. These can be used for debugging without needing internal access to the robot. These ports are all connected directly to the robot's computer.
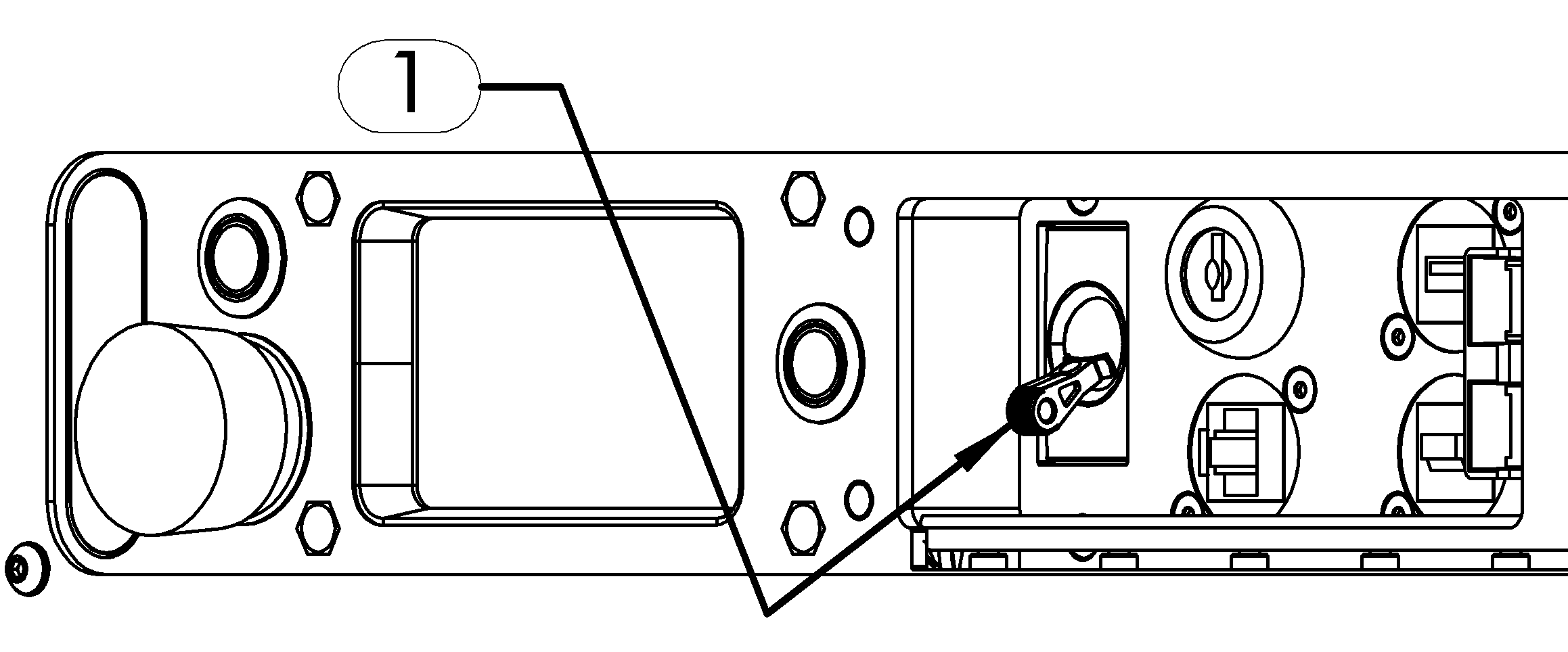
Wireless Emergency Stop Bypass
In addition to the Emergency Stop buttons on the robot, if your Husky A300 is equipped with an optional wireless Emergency Stop kit, it is possible to disable this function with the override key switch. Refer to Wireless Emergency Stop, Integration, and the image below, for further details.
CAUTION
Only change the key switch position while the robot is powered off. Otherwise, the robot may be in an undefined state.
CAUTION
The key for Wireless Emergency Stop Bypass must be stored in a secure location and used only be a trained technician that has reviewed the manual and the risk assessment for their workplace. Disabling the Wireless Emergency Stop removes a safeguard for the system, which results in increased risk of collisions. The key should not be left in the robot during operation.
Airflow Intake and Exhaust
The robot is equipped with a cooling system with air intake at the front of the robot and exhaust at the rear of the robot. The amount of airflow scales automatically depending on the temperatures reported by various sensors.
Interior Features
Removing the top plate exposes the electronics tray, which contains the following:
- Computer
- GPU (optional)
- IMU
- User power expansion
- Network switch

Removing the electronics tray exposes the batteries. Husky is available in 2-battery, 4-battery, and 6-battery configurations.
Computer
Husky is equipped with an Intel-based computer in a Mini-ITX form factor. Several SKUs are possible depending on the desired performance of the system.
GPU (Optional)
An optional GPU can be added and connected to the computer for additional graphics processing.
IMU
A standard 6-axis IMU is included by default. Upgrade options are available.
Power Expansion
Husky A300 provides power breakouts to allow the integration of customer payloads. Refer to User Power Connections and High Power Expansion Kit for more details.
Network Switch
Husky includes a network switch, which allows additional payloads to be integrated with an Ethernet connection. See also Husky Networking.
Batteries
Husky can be equipped with two, four, or six batteries. These batteries are not hot-swappable. Refer to Maintenance for details on battery maintenance.
Autonomous Mobile Platform (AMP) Kit
Husky A300 can be equipped with an Autonomous Mobile Platform (AMP) Kit, which includes extra sensors (as illustrated below) and OutdoorNav software. Combined, this allows for autonomous navigation of Husky A300 and related system development.
DANGER: Crushing / Impact
Never rely on the AMP kit as only method to avoid collisions.
While extensive testing has been performed to validate system robustness, autonomous operation of Husky A300 with the AMP kit is not safety rated in accordance with ISO 13849 or similar standards. The AMP kit is intended for research and development purposes and is not intended for use in deployments where hazards are mitigated exclusively through the use of the AMP kit. The user is responsible for ensuring that the Husky A300 with AMP kit does not result in hazards in the target operating environment.
Contact Support for details on how to upgrade to a safety-rated autonomy system for Husky A300.

Orientation References
The reference frame used by all Clearpath Robotics ground robots is based on ISO 8855, and is shown in the figure below. Husky's front is shown. When commanded with a positive translational velocity (forward), wheels travel in the positive X-direction. The direction of the axes differs from those used for roll, pitch, and yaw in aircraft, and care should be taken to ensure that data is interpreted correctly.
Robot Equations
As a starting point, Clearpath Robotics recommends using the following relationship between wheel velocity and platform velocity:
represents the instantaneous translational speed of the platform and the instantaneous rotational speed.
and are the right and left wheel velocities, respectively.
is the effective track of the robot, 0.562 m.
Unboxing
Time Required
Approximately 15 minutes.
Required tools
- 14 mm socket and driver
What's Inside
Your Husky A300 base platform shipment contains the following:
- Husky A300 robot
- Two or more LiFePO4 batteries (integrated)
- Computer (integrated)
- IMU (integrated)
- Network switch (integrated)
- One battery charger
- One PS4 controller
If you purchased the AMP variant, standard payload modules or custom integration services with Husky, then additional equipment will be included per your specific configuration, plus further documentation as required.
Unboxing the Husky A300
Follow the steps below to remove Husky A300 from its crate.
- Remove the bolts securing the front panel of the crate.
- Position the front panel as a ramp at the bottom of the crate.
- Loosen and remove the retaining straps.
- Gently roll the Husky A300 out of the crate.
Quick Start
This section outlines how to power up and drive the robot. For more details on these steps, refer to Basic Usage.
- Open the Access Panel cover, set the Battery Breaker to the "ON" position, and close the Access Panel cover.
- Press and hold the Power Button for one second and then release it.
- Wait one minute for the robot to initialize fully. Once initialized, the front lights should be solid white and the rear lights should be solid red.
- Press and release the Safety Restart button.
- Press the "PS" button on the joystick controller to connect it to the robot.
- Press either the L1 or R1 enable button (slow or fast mode, respectively) and use the left thumbstick to drive Husky. See further details at Connecting and Using the Controller.
Basic Usage
This section describes the operation of the Husky.
Lock-Out Tag-Out
Only trained personnel authorised by Clearpath Robotics shall open the Husky A300.
DANGER
Always perform the Lock-Out Tag-Out procedure prior to performing maintenance inside Husky A300.
The Battery Breaker terminal connected to the battery (displayed below) is live even when the robot is locked out. These terminals at the breaker and at the battery are protected with rubber covers. Do not remove these or any other terminal covers. The main chassis will act as the negative side of the battery. If the robot is correctly locked out, all live terminals are protected. The robot must be locked out to properly protect the remaining connections.
Normal preventative maintenance tasks will not require the user to open the Husky A300 to expose these connections.
CAUTION
Always wear safety boots or shoes with steel toes while working with a Husky A300.
The robot may move unexpectedly.
Husky A300 Lock-Out Tag-Out
- Press one of the Emergency Stop buttons.
- Press and hold the Power Button for one second, then release it.
- Wait until all lights on Husky have turned off (up to 10 seconds). This indicates that all electronics have powered off.
- Open the Access Panel cover, set the Battery Breaker to the "OFF" position, and close the Access Panel cover.
- Clamp the Lock-Out Tag-Out lock to prevent the Access Panel cover from being opened.

Starting Up
Before turning on Husky the first time, place Husky "up on blocks", making sure that the wheels are clear of the ground. This reduces hazards while becoming familiar with how the various subsystems work.
To power on Husky:
- Open the Access Panel cover, set the Battery Breaker to the "ON" position, and close the Access Panel cover.
- Press and hold the Power Button for one second and then release it.
- Wait one minute for the robot to initialize fully. During startup, the Status Lights will be solid red. Once initialized, the front lights should be solid white and the rear lights should be solid red.
- Press and release the Safety Restart button to be able to drive the robot.
Shutting Down
If you are servicing, transporting, or storing Husky, perform the Lock-Out Tag-Out procedure; otherwise, perform the steps below.
To power off Husky:
- Press and hold the Power Button for one second and then release it.
- Wait until all lights on Husky have turned off (up to 10 seconds). This indicates that all electronics have powered off.
Charging
DANGER
Always use original chargers from Clearpath Robotics when charging the Husky A300.
Using other chargers may cause damage to the batteries.
WARNING
Never charge Clearpath Robotics robots in environments with combustable materials.
Sparks may occur and could cause combustable materials to ignite.
Husky A300 ships with its batteries installed and they charged in place. The batteries may be charged with the standard manual/wired charger or with the optional wireless charger upgrade kit.
Manual/Wired Charging
A manual (wired) charger can be used to charge the Husky batteries by following the steps outlined below. Two manual chargers are supported with Husky A300:
- Husky A300 Standard Manual Charger (Henryuan Model PSY27710000): 277 W, indoor use only
- Husky A300 High Power Manual Chargers
- Robots with 2 batteries: Delta-Q Model IC650: 650W, indoor or outdoor use (IP66)
- Robots with 4 or 6 batteries: Delta-Q Model IC1200: 1200 W, indoor or outdoor use (IP66)
CAUTION
Never use the Husky A300 Standard Manual Charger in outdoor environments.
This charger is for indoor use only. Only use this charger when the robot is inside and after it has been dried. Otherwise, electric shock may occur.
The batteries can be charged when the robot is powered on or powered off, though the charging will progress more quickly when the robot is powered off.
- Open the Access Panel cover to expose the Battery Charger Port.
- Connect the DC output cable from the Standard Charger to the battery terminal connector (red-to-red, black-to-black).
- Plug the Standard Charger power cord into the Standard Charger and then into a wall receptacle. The LED on the Standard Charger will illuminate red and Husky's Status Lights will pulse yellow/green (if the robot is powered on).
- When battery is charged fully, the LED on the Standard Charger will illuminate green if the the robot is powered off. Alternatively, if the robot is powered on the LED on the Standard Charger will remain red and Husky's Status Lights will pulse blue/green.
- Unplug the Standard Charger from the wall and then disconnect it from the Battery Charger Port.
- Close the Access Panel cover.
Wireless Charging (Optional Kit)
The system may include an optional wireless charging kit. When the kit is included, it includes two main parts:
- a wireless charging receiver mounted on the right side of the Husky A300;
- a docking station, separate from the robot, which includes the wireless charging transmitter.
This optional kit allows the Husky A300 to be charged by positioning it such that the wireless charging receiver is located near the wireless charging transmitter. For maximum charge rates, the receiver should be positioned within 30 mm of the transmitter. This positioning can be performed manually by the user or automatically using the OutdoorNav docking function, when the robot is equipped with the optional AMP Kit. Note that wireless charging can be performed with the robot in both the powered and unpowered states, as long as the Battery Breaker is in the "ON" position.
When the wireless charging receiver is near the transmitter, charging will begin automatically without any user intervention. When charging is complete, the transmitter will stop charging automatically and the status display will be updated accordingly. Note that when the robot is powered on, the charging may remain on indefinitely (though at a reduced rated) as the transmitter provides the on-going power for the powered-on electronics.
At any time while charging, the robot can be moved away from the transmitter to stop charging and begin using the robot. No other user intervention is required to stop charging.
Moving an Unpowered or Disabled Husky
It is much easier to manually push an unpowered robot than one that is powered, as a powered robot will attempt to hold its position, possibly resulting in damage to the robot. Pushing an unpowered robot at normal speeds will not damage it.
To shut down Husky and move it manually:
- Follow the steps in Shutting Down, including the Lock-Out Tag-Out procedure.
- Carefully remove or fully secure any payloads on Husky.
- Carefully push or transport Husky to the desired location.
- After moving Husky, make sure to position it on level ground to prevent it from rolling.
CAUTION
Never push Husky A300 using a powered device at speeds above 2 m/s, such as pushing it with a forklift.
This can damage the internal circuitry. If a Husky needs to be moved manually over longer distances, it should be lifted and secured to a travelling vehicle or palette for transport.
Husky Lift Points
Husky has a robust structure that allows it to be picked up or reoriented by hand, using the bumper bars, or with the use of lifting machinery such as a crane, using lifting straps on the bottom of the robot. When using lifting straps, they should be positioned as shown in the images below. The lifting equipment and straps used shall be rated to minimum weight equal to the weight of Husky, including any mounted payloads. See System Specifications for the weight of Husky and its maximum payload.
WARNING
Never attempt a 1-person lift of Husky A300.
Husky A300 exceeds the weight to be lifted by a single individual. If lifting by hand, ensure to ask for assistance and use proper lifting techniques.
WARNING
Never use the bumper bars to lift Husky A300 with mounted payloads.
This may exceed the lift rating for the bumper bars. It may also exceed the safe limit for a 2-person lift. Use lifting straps instead.
CAUTION
Ensure that the the lifting straps are not applying a force on any structures not suitable for lifting, especially mounted payloads.
This may cause damage to the equipment and shifting of the payload during lifting.
CAUTION
Never lift Husky A300 using a forklift without lifting straps.
The load may become unstable and fall.
Storage
Before storing Husky for an extended period of time (greater than two days), Husky A300 must be charged to at least 50%. Also, the Battery Breaker must be set to the "OFF" position before storing Husky A300 for an extended period of time.
Even with the batteries disconnected from the system, the batteries will discharge over time and must be charged periodically. It is recommended that a Husky A300 in storage be powered on at least once every three months, its battery levels checked, and if the reported charge level is below 20% it should be charged back up to at least 50% before returning it to extended storage.
Husky and any spare batteries outside of the vehicle should be stored within the temperature range outlined in System Specifications.
Husky Networking
Husky provides both Ethernet and Wi-Fi network connection options. The details below outline the configuration for the different options.
Connecting to Husky over an Ethernet Connection
Regardless of the Wi-Fi mode, Husky can always be accessed over an Ethernet connection. Follow the steps below to connect to Husky over an Ethernet connection.
- Open the Access Panel cover on Husky to expose the debug Ethernet port.
- Connect an Ethernet cable from Husky's debug Ethernet port to a computer.
- Set the computer's IP address and netmask as shown below.
- IP Address: 192.168.131.100
- Netmask: 255.255.255.0
- Confirm that you can ping Husky from the computer's terminal window in Linux or the
command prompt in Windows by entering the following command:
ping 192.168.131.1The output should be similar to the following.Pinging 192.168.131.1 with 32 bytes of data:
Reply from 192.168.131.1: bytes=32 time<1ms TTL=128
Reply from 192.168.131.1: bytes=32 time<1ms TTL=128
Reply from 192.168.131.1: bytes=32 time<1ms TTL=128
Reply from 192.168.131.1: bytes=32 time<1ms TTL=128
Ping statistics for 192.168.131.1:
Packets: Sent = 4, Received = 4, Lost = 0 (0% loss),
Approximate round trip times in milli-seconds:
Minimum = 0ms, Maximum = 0ms, Average = 0ms - Connect to your robot via SSH. To do so, execute the following in a terminal window:
You will be promoted to enter a password. The default password is
ssh robot@192.168.131.1clearpath.noteAll Clearpath robots ship from the factory with their login password set to
clearpath. Upon receipt of your robot we recommend changing the password. To change the password, run the following command on the robot:passwdThis will prompt you to enter the current password, followed by the new password twice. While typing the passwords in the
passwdprompt there will be no visual feedback (e.g. "*" characters).
Husky Wi-Fi Network Configuration
Husky can be configured to connect to an existing Wi-Fi network.
Connecting Husky to a Network over Wi-Fi
To get Husky connected to your local Wi-Fi network, follow the setup below.
- Follow the steps for Connecting to Husky over an Ethernet Connection.
- Run
sudo clearpath-computer-setupand follow the Custom Networking instructions for setting up the Wi-Fi connection.
Connecting and Using the Controller
To use your controller, it must be paired with your Husky and powered on. Follow the instructions in the Joystick Controller Pairing to pair the controller to Husky.
To teleoperate Husky, first clear any stop conditions. Then, referring to the following images, press an enable button (either slow or fast mode) and use the left thumbstick to drive Husky.
In slow mode, the maximum robot speed is 0.3 m/s; in fast mode, the maximum robot speed is 2.0 m/s.

Using ROS
Robot Operating System (ROS) is an extensible framework for controlling and working with robotic systems. Clearpath Robotics recommends using ROS with your robot. If this is your first time using ROS, it is strongly recommended to run through our series of ROS tutorials to learn the basics of ROS.
Husky A300 is compatible with ROS 2 Jazzy.
Maintenance
See Husky A300 Maintenance for details on Husky maintenance.
Disposal
Always observe environmental protection regulations valid to your region.
If disassembling the Husky A300 for disposal, pass on any commercially-viable disassembled components for recycling. Separate materials as far as possible by type.
Do not incinerate or dispose of the batteries. Return end-of-life or defective batteries to your nearest recycling center per appropriate local regulations.
Troubleshooting
See Husky A300 Troubleshooting for details on Husky troubleshooting.
Declarations
The Husky A300 base configuration meets regulatory requirements as outlined in the manual and as marked on the robot (CE marking, FCC / ICES, etc). Additions to the robot outside the marked version invalidate the markings and may require additional conformity assessments.
FCC Supplier's Declaration of Conformity
47 CFR § 2.1077 Compliance Information
Husky A300
Responsible Party
Rockwell Automation, Inc. 1201 South Second Street Milwaukee, Wisconsin 53204-2410
Point of Contact
Ryan Gariepy, CTO (OTTO Motors and Clearpath Robotics)
ryan.gariepy@rockwellautomation.com
1-844-733-6886
This device complies with Part 15 of the FCC Rules.
Operation is subject to the following two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation.
Contains Transmitter Module FCC ID: PD9AX210NG
Changes or modifications not expressly approved by Clearpath Robotics Inc. could void the user's authority to operate the equipment.
This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This product generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the manufacturer's instruction manual, may cause harmful interference with radio communications. Operation of this product in a residential area is likely to cause harmful interference, in which case you will be required to correct the interference at your own expense.
These limits are designed to provide reasonable protection against harmful interference in a non-residential installation. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:
- Reorient or relocate the receiving antenna.
- Increase the separation between the equipment and receiver.
- Connect the equipment into an outlet on a circuit different from that which the receiver is connected.
- Consult the dealer or an experienced radio/TV technician for help.
FCC Radiation Exposure Statement: This product complies with FCC §2.1091(b) for mobile RF exposure limits, set forth for an uncontrolled environment and is safe for the intended operation as described in this manual. Per FCC requirements, maintain a distance of more than 8 inches (20 cm) between any person and the host device.
Innovation, Science and Economic Development Canada (ISED) Compliance Notice
Contains Transmitter Module IC: 1000M-AX210NG
This device contains a license-exempt transmitter/receiver that complies with Innovation, Science and Economic Development (ISED) Canada's license-exempt RSS(s). Operation is subject to the following 2 conditions: (1) this device may not cause interference, and (2) this device must accept any interference, including interference that may cause undesired operation of the device.
CAN ICES-003(A) / NMB-003(A)
CAN ICES-002(A) / NMB-002(A)
This Class A digital apparatus complies with Canadian ICES-002 and ICES-003.
Under Industry Canada regulations, this radio transmitter many only operate using an antenna of a type and maximum (or lesser) gain approved for the transmitter by Industry Canada. To reduce potential radio interference to other users, the antenna type and its gain should be so chosen that the equivalent isotropically radiated power (e.i.r.p.) is not more than the necessary for successful communication.
ISED Radiation Exposure Statement: This product complies with the Canadian Standard RSS-102 for portable RF exposure limits, set forth for an uncontrolled environment and is safe for the intended operation as described in this manual. Per ISED requirements, maintain a distance of more than 8 inches (20 cm) between any person and the host device.
Support
Clearpath is committed to your success. Please get in touch with us and we will do our best to get you rolling again quickly: <support@clearpathrobotics.com>.
To get in touch with a salesperson regarding Clearpath Robotics products, please email <research-sales@clearpathrobotics.com>.
If you have an issue that is specifically about ROS and is something which may be of interest to the broader community, consider asking it on Robotics Stack Exchange. If you do not get a satisfactory response, please ping us and include a link to your question as posted there. If appropriate, we will answer on Robotics Stack Exchange for the benefit of the community.