Husky A300 Troubleshooting

Robots are complex. Issues can occur. Examine the following information for possible methods to recover from an unexpected state of Husky. See Components Overview for detail on button locations and vehicle state indicators. Contact our support team at <support@clearpathrobotics.com> if the issue persists.
Power
Husky will not turn on
- Check that both On/Off Breaker is in the "ON" position, then press and hold the Power Button for 1 second.
- If the step above does not work, connect the manual charger for one hour to ensure that the batteries have sufficient charge and repeat the step above.
- If the issue persists, contact Support.
Status lights and status panel
Status lights are solid red
This indicates that the MCU is not in contact with the computer. This condition will be seen briefly on startup while robot's computer is booting up. If it persists, or is seen after initialization, refer to the debugging steps below.
- Try power cycling the robot to see if the issue persists.
- If the issue persists, the base node on the computer has crashed, the network switch has failed, or a serious
MCU error has occurred. The following checks can help isolate the source of the error. Run the check below and
then contact Support for further assistance.
- From a wired Ethernet connection, attempt to ping the robot
computer to see if it is accessible:
ping 192.168.131.1 - From a wired Ethernet connection, SSH to the robot
computer (
ssh robot@192.168.131.1) and determine if ROS is running:sudo systemctl status clearpath-platform - From a wired Ethernet connection, attempt to ping the robot
MCU to see if it is accessible:
ping 192.168.131.2
- From a wired Ethernet connection, attempt to ping the robot
computer to see if it is accessible:
Status lights indicated a battery fault
Only original chargers from Clearpath Robotics should be used when charging the Husky A300 to avoid any damage to the batteries and to reduce hazards. Use proper personal protective equipment (PPE) if attempting to handle the batteries.
- Disconnect any chargers and power cycle the robot to clear any transient state issues.
- If the issue persists, power off the robot, charge the robot batteries fully using the manual charger, disconnect the charger, and power on the robot.
- If the issues persists, contact Support.
Status lights indicate a motor fault
- Make note of the motor with the fault condition based on the status light pattern.
- Power cycle the robot to see if the issue persists.
- If the issue persists, collect a rosbag of the following
topics, then contact Support with the rosbag.
- /a300_XXXXX/platform/mcu/status
- /a300_XXXXX/platform/mcu/status/power
- /a300_XXXXX/platform/motors/debug
- /a300_XXXXX/platform/motors/feedback
- /a300_XXXXX/platform/motors/status
- /a300_XXXXX/platform/motors/system_protection
- /a300_XXXXX/platform/safety_stop
Robot is stuck in emergency stop state
- Confirm that all Emergency Stop buttons on the robot are disengaged.
- Confirm that any remote emergency stop units, if present, have their stop buttons disengaged and restart button pressed (if applicable).
- Confirm that all external stop devices are functioning, and that their related switches and relays are closed. You may need to use a multimeter to test voltage between the external stop connector and each of these external stop switches.
- Press the Restart button.
- If the above fails, power cycle the robot to see if the issue persists.
- If the issues persists, contact Support.
You can confirm the emergency stop state in ROS by running:
ros2 topic echo /a300_XXXXX/platform/emergency_stop
Status lights indicate that motor protection is engaged
- On the robot, check the following topics to confirm that one or motors are in the protection state:
ros2 topic echo /a300_XXXX/platform/motors/system_protection - Wait 30 minutes for the motors to cool and confirm that the protection state has cleared.
- If the issues persists, contact Support.
Status panel indicates a communication fault
A communication fault indicates that the Husky's computer to microcontroller Ethernet connection is not established. This connection requires:
- The computer to be on.
- The MCU to be on.
- The Ethernet cable connection from the computer to the MCU to be functioning properly.
- The MCU has Husky's firmware installed on it.
If your Husky was functioning recently, the most common causes are:
- Husky's computer is not powered, or is still booting. Wait 60 seconds after startup to see if the computer-to-MCU connection starts after the computer turns on. If not, connect to the computer with SSH, or using a computer monitor to see if the computer is running.
- The Ethernet cable is not connected. Check that the cable is connected securely at both ends.
- Someone has changed the robot.yaml configuration file. You can review the robot.yaml on the Husky
computer by running:
nano /etc/clearpath/robot.yaml
Status panel indicates a Wi-Fi fault
- Confirm that Husky Wi-Fi has been configured correctly,
including correct SSID and password. Confirm that the settings are correct in the
corresponding
/etc/netplan/file. - From Husky's computer, run
ip ato review the status of the wireless interface and determine if the connection has been established. - Power cycle the robot and see if the issue persists.
- If the issues persists, contact Support.
Mobility
Husky experiences momentary drops in communication, or Husky's velocity has an inconsistent jumping motion
It's possible the robot has reached the thermal limit, or current limit. Refer to the notes above regarding motor protection.
If you are unsure whether this is the case, collect a rosbag of the following topics, then contact Support with the rosbag.
- /a300_XXXXX/platform/mcu/status
- /a300_XXXXX/platform/mcu/status/power
- /a300_XXXXX/platform/motors/debug
- /a300_XXXXX/platform/motors/feedback
- /a300_XXXXX/platform/motors/status
- /a300_XXXXX/platform/motors/system_protection
- /a300_XXXXX/platform/safety_stop
Husky speed is momentarily incorrect when first driving after power up
When first attempting to drive Husky after power-up, Husky's motors go through a calibration process (requires less than a quarter of a wheel revolution). During this time, there may be minor deviations in the commanded and actual motor speeds. No user intervention is required.
Husky stutters when first stopped on a slope
To minimize the holding current required when stopped on a slope (to avoid thermal limits over time), Husky may undergo a very minor positioning adjustment to reduce forces in the flexible suspension.
To reduce the stutter, only enter a hold position on a slope from a straight direction rather than a turn.
Husky rolls on a slope during emergency stop
As outlined in the User Manual, during the emergency stop state, no power is supplied to the motors. As such, Husky can roll, either due to user intervention or due to gravitational forces on a slope.
Husky is equipped with a resistive electric brake that limits its speed in the emergency stop state. The maximum roll speed in this state depends on both the slope and payload.
Husky is making a loud or unusual mechanical noise
- If the sound is coming from the sides of the robot, check the wheels to ensure no debris or object is jammed in or near the wheels.
- If the sound is coming from the top of the robot, check to make sure the payloads are attached securely.
Networking
Not getting Wi-Fi internet connection
See above.
Cannot connect to the robot's computer over a network cable
- Check that the robot is powered on and that no faults are report on the Status Lights or Status Panel.
- Check that the external computer is configured correctly (IP address, netmask).
- Check that the Ethernet cable is connected securely between the robot and the external computer. Where possible, check for Ethernet link LEDs being illuminated.
- Attempt to
ping 192.168.131.1from the external computer. - If the
pingfails, connect a keyboard and monitor to the Debug Ports and log in to the computer directly. This confirms the username and password. - Using the keyboard/monitor, run
ip aand confirm that an interface with IP address of192.168.131.1exists. - Power cycle the robot to see if the issue persists.
- For additional assistance, refer to the Networking page or contact Support.
Computer
The computer does not start automatically
Refer to the Mini ITX troubleshooting page.
The computer keeps reverting to old BIOS settings
Refer to the Mini ITX troubleshooting page.
The 13th-gen Mini ITX computer does not power on and has no output on HDMI
On rare occasions, this can occur if the BIOS gets reset and does not power on the computer by default.
- Remove the top plate from the robot, then power cycle the robot and check the following.
- Is the CPU fan spinning?
- Are there any beeps at power on?
- If the CPU fan is not spinning and there are no beeps at power on, use a paperclip to short
the PWRBTN# and GND pins on the PANEL1 header on the motherboard. Remove the paperclip after
one second.
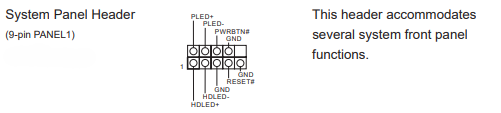
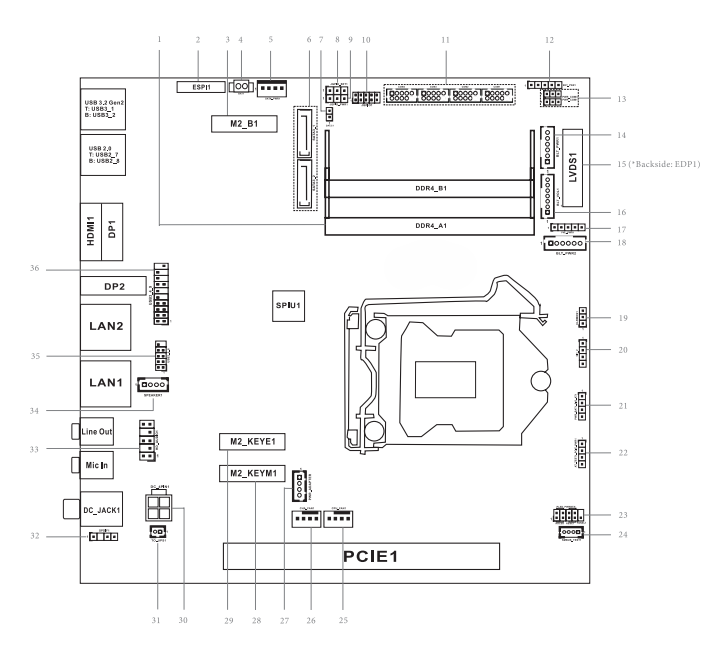
Husky A300 Mini ITX PANEL1 (Position 23) - If the step above was successful in powering on the computer, reboot the computer, enter
the BIOS setup and update the settings so that the computer powers on by default.
Specifically, navigate to
Advanced → Chipset Configuration → Restore on AC/Power Lossand set the value toPower On.
ROS
ROS is not starting
Contact Support.
Sensors are not turning on
- Check that the sensor's User Power connector has the correct voltage.
- If the voltage is correct, then review the Troubleshooting section for the related sensor.
Support
Clearpath is committed to your success. Please get in touch with us and we will do our best to get you rolling again quickly: <support@clearpathrobotics.com>.
To get in touch with a salesperson regarding Clearpath Robotics products, please email <research-sales@clearpathrobotics.com>.
If you have an issue that is specifically about ROS and is something which may be of interest to the broader community, consider asking it on Robotics Stack Exchange. If you do not get a satisfactory response, please ping us and include a link to your question as posted there. If appropriate, we will answer on Robotics Stack Exchange for the benefit of the community.
Collecting a rosbag
Our Support team may ask you to create a rosbag. This is a tool that saves ROS data to a file, so we can review it after the robot has been turned off.
For example, we may ask you to record the /status topic so we can review motor temperatures, and other diagnostic data. To create this rosbag, you would:
- Log into the robot's computer.
- Run the command
ros2 bag record /status - Use your robot as you typically would, trying to recreate the issue you have been experiencing.
- Once done, in the terminal, press
ctrl+cto stop the command. - Enter
ls, and find the new file that was created. It will have a file extension of .bag - Copy this file to your development computer, using a command like
scp. Send this .bag file to Clearpath Robotics in your Support email request.