Links
Links are any URDF primitive.
Just as is the case in URDF, links have their frame at the center of the primitive. In other words, you will need to slide up all links by half their height to have it "sit" on its parent link.
Frame
Just a link without any geometry.
 | |
Box
A box of defined size.
 | |
Cylinder
A cylinder of defined height and radius.
 | |
Sphere
A sphere of defined radius.
 | |
Mesh
Include your custom mesh without creating a URDF of your own. You can either provide an absolute link to the mesh file or if it is included in a ROS 2 package, then you can provide both the package name and relative link to the install location within the package.
If you prefer to add a URDF instead, then you can link it directly through the platform.extras entry.
 | |
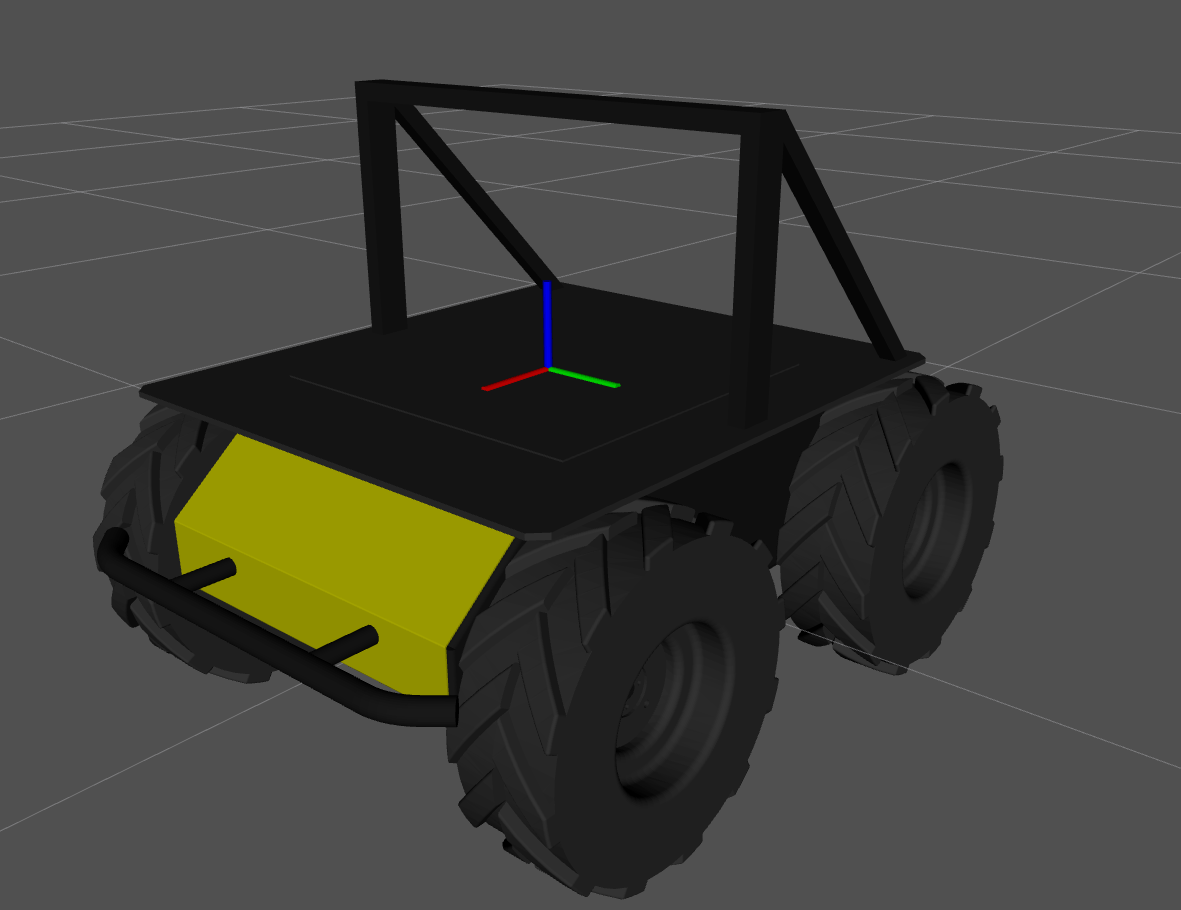
Sample
Sample A200 Links Section
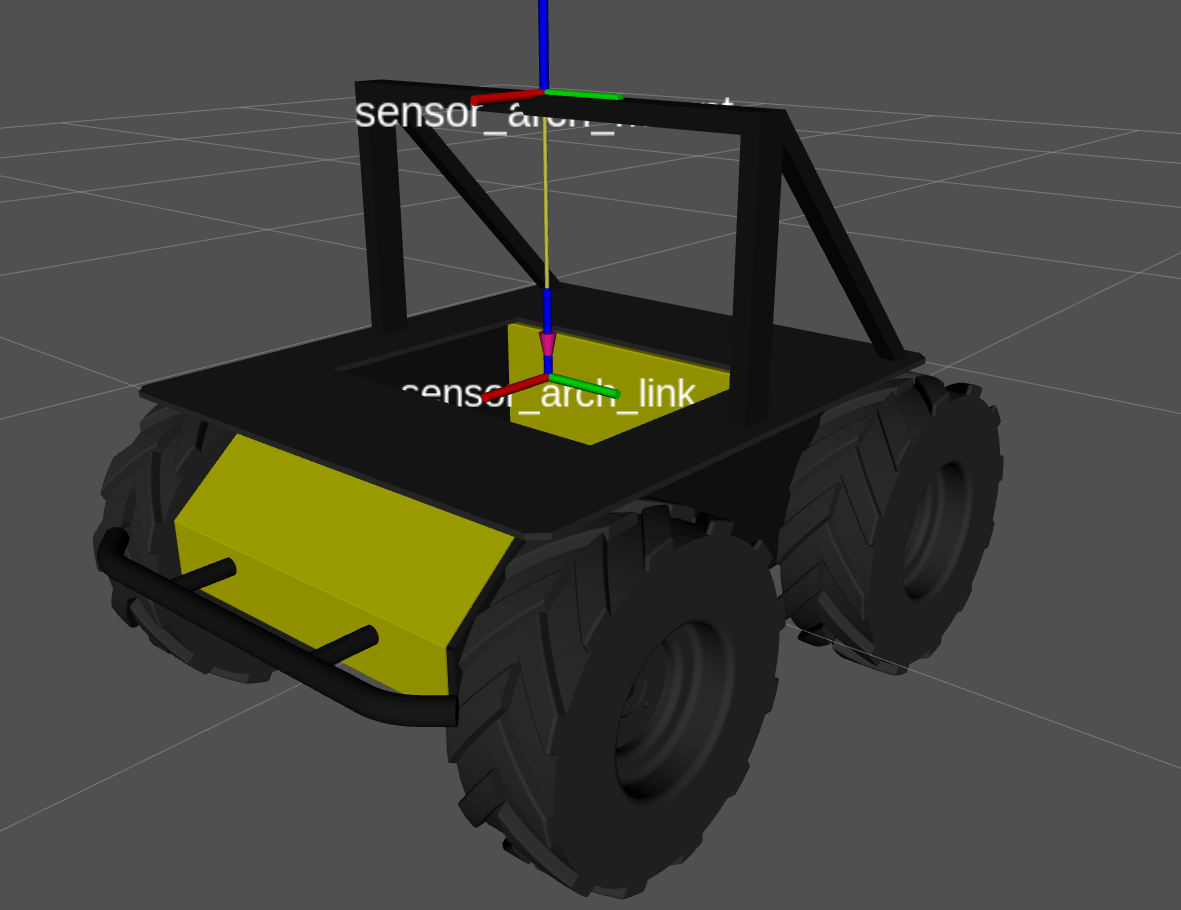
In this sample, we will use links to add thin box to cover up the user bay.
We add an entry under the box list:
box:
- name: user_bay_cover
parent: top_plate_link # add it to the top_plate_link
xyz: [0.0, 0.0, 0.00735] # move it up 6.35mm (thickness of top plate) and move it up 1mm (half height of the box)
rpy: [0.0, 0.0, 0.0]
size: [0.4, 0.4, 0.002] # length 400mm, width 400mm and 2mm thick.
We leave the rest of the lists all empty, for the resulting links section:
links:
box:
- name: user_bay_cover
parent: top_plate_link
xyz: [0.0, 0.0, 0.00735]
rpy: [0.0, 0.0, 0.0]
size: [0.4, 0.4, 0.002]
cylinder: []
frame: []
mesh: []
sphere: []