Starter Kit Hardware Checklist
The OutdoorNav Starter Kit from Clearpath Robotics contains:
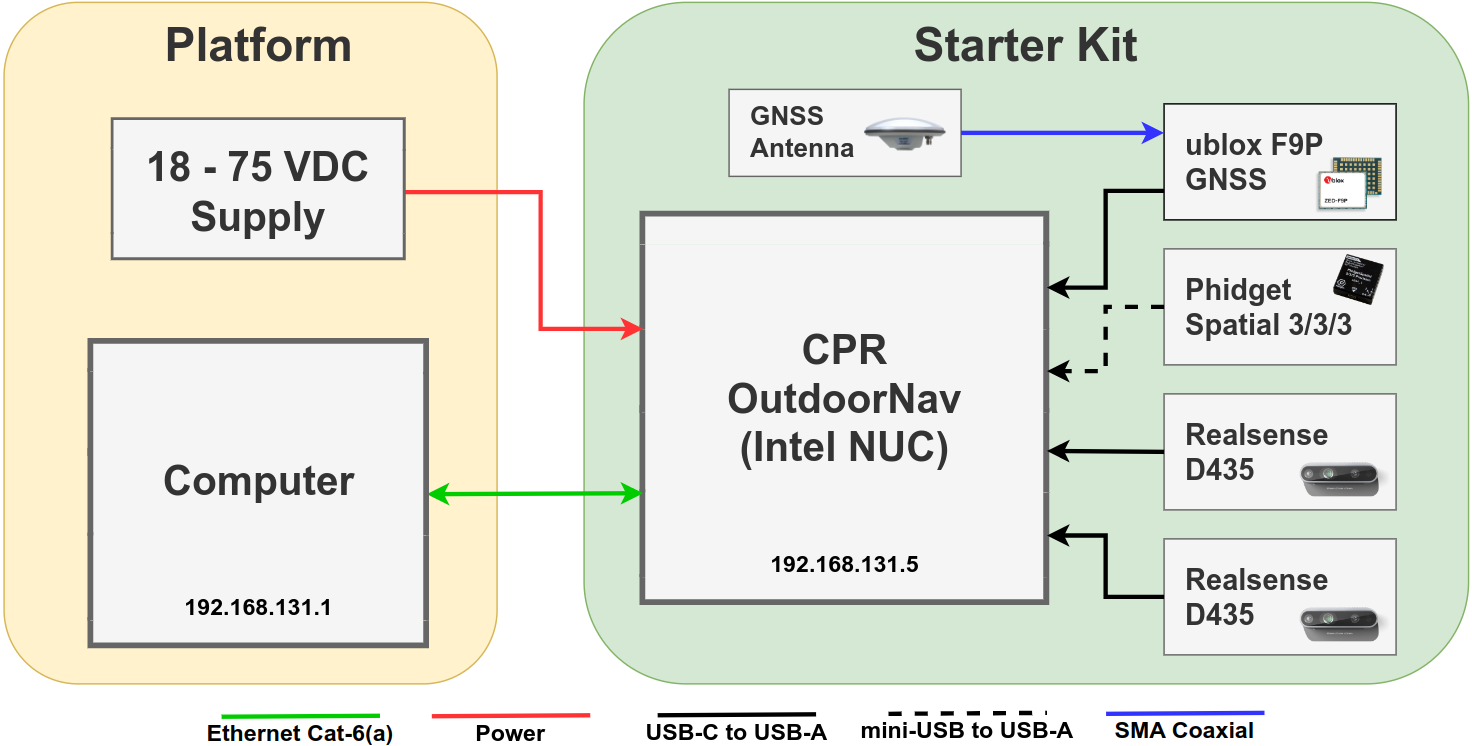
- Ublox F9P GNSS
- Phidget Spatial 3/3/3 IMU
- RealSense D435f (x2) Depth Camera
To integrate this kit onto your robot, ensure that all of the requirements below are satisfied for proper operation of the OutdoorNav software. Refer to the OutdoorNav Starter Kit for additional integration details.
To integrate this kit onto your robot, ensure that all of the requirements below are satisfied for proper operation of the OutdoorNav software.
| Requirement | |
|---|---|
| The Starter Kit should be rigidly fixed to the UGV. Ie. It should not move or rotate relative to the UGVs base_link. | |
| Once mounted, the XYZ position of the Starter Kit frame relative to the base_link frame has been noted here: X: , Y: , Z: | |
| The Starter Kit is connected to the base robot computer via a gigabit ethernet cable (Cat6(a) minimum). | |
| The Starter Kit is power by an 18 - 75 V source supplied by the UGV. |
Should any of the external sensors positions need to be moved, the following constraints should be followed:
The GNSS antenna is to be placed upright, on an unobstructed part of the UGV with clear visibility.
The RealSense D435f cameras should be placed with a minimal amount of their field of view (FoV) obstructed by the UGV body.
The new XYZ position of the GNSS antenna and/or the Realsense D435f cameras relative to the Starter Kit Frame are noted below:
Sensor X Y Z R P Y GNSS Antenna 0.0 0.0 0.0 RealSense D435f (front) RealSense D435f (rear)
Signature: Date: