ROS Interface Control Requirements
ROS Interface Control Checklist
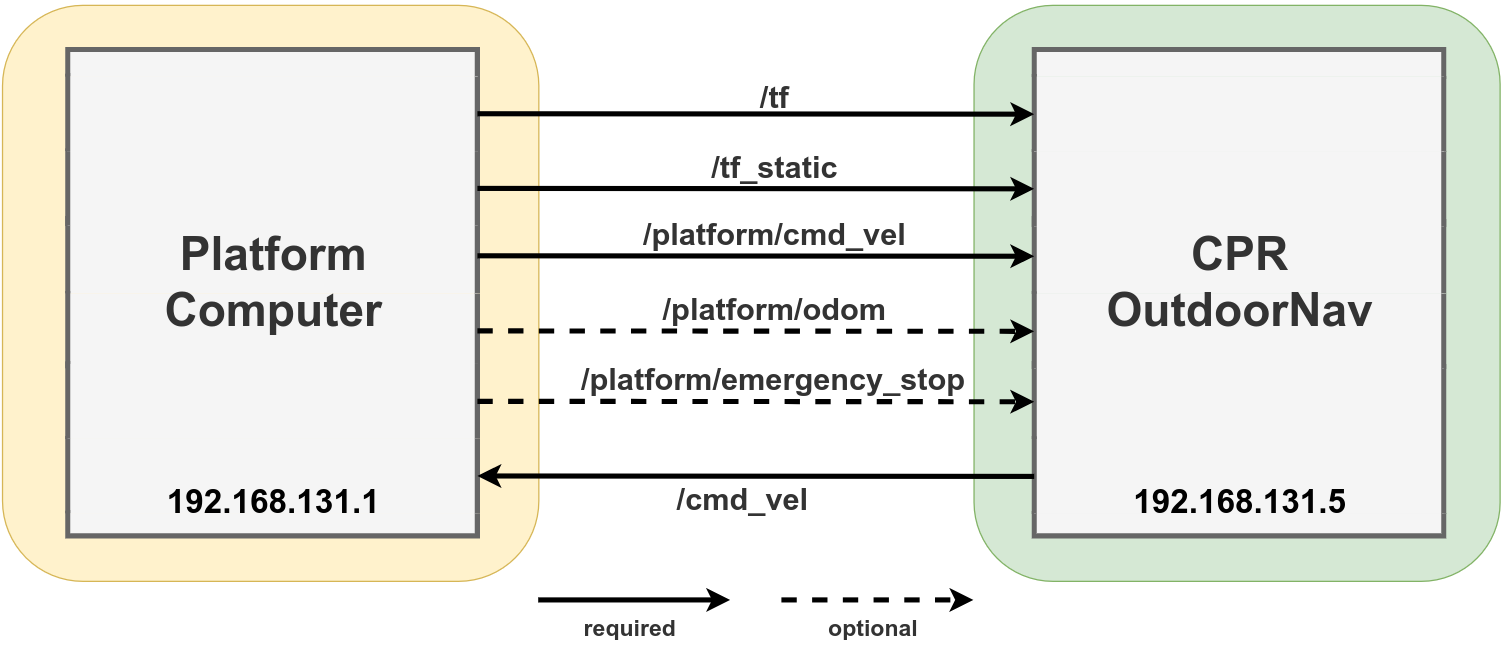
Prior to the installation and tuning of Clearpath Robotics (CPR) OutdoorNav software on your platform (robot computer), CPR requires that the platform's ROS interface satisfies the conditions listed below. Ensure that all of the requirements are satisfied for a smooth installation and tuning process.
| Requirement | |
|---|---|
| The platform computer is on the 192.168.131.xxx subnet (ideally in the range 1-4). | |
| The platform computer has an installation of ROS 1 Noetic. | |
A URDF is supplied to CPR by the customer, in which the base_link coordinate frame is defined according to the REP-105 base-link ROS standard. | |
The platform outputs tf2_msgs/TFMessage messages on the ROS standard /tf topic, at a minimum rate of 30 Hz. | |
The platform outputs a latched tf2_msgs/TFMessage message on the ROS standard /tf_static topic. This should include any fixed frames of ROS enabled devices/sensors that are available on your platform. | |
The platform computer has a velocity controller that accepts, as input, geometry_msgs/Twist messages on the ROS standard /cmd_vel topic, at a minimum rate of 10 Hz. | |
The platform computer has a velocity controller that tracks the input velocity and outputs the resulting platform velocity on the /platform/cmd_vel topic. | |
The platform outputs nav_msgs/Odometry messages on the /platform/odom topic, at a minimum rate of 10 Hz. | |
The /platform/odom topic publishes its data with the header.frame_id = odom and the child_frame_id = base_link, as per the REP-105 odom ROS standard. IMPORTANT: The platform should however not broadcast the odom --> base_link transformation since the OutdoorNav software will do so. | |
| If available, the platform odometry output has less than ±5% linear position error. | |
| If available, the platform odometry output has less than ±5% orientation error. | |
The platform outputs std_msgs/Bool messages on the /platform/emergency_stop topic, at a minimum rate of 5 Hz, indicating whether or not the platform is in a stopped state. | |
| Perform the validation tests described in Interface Control Validation Test section and record a rosbag of all of your topics. The linear and angular velocities of the three trial runs recorded should be noted here: Trial #1: Linear x: , Angular z: Trial #2: Linear x: , Angular z: Trial #3: Linear x: , Angular z: |
Consult the Platform API for detailed information on the published/subscribed platform topics.
If the platform is an Ackermann (or double Ackermann) drive vehicle:
| Requirement | |
|---|---|
| A conversion from geometry_msgs/Twist messages to Ackermann inputs is provided. |
Ackermann drive platforms require both steering and throttle inputs to
drive the platform. It is required that our OutdoorNav output /cmd_vel
be converted into a message suitable to your platform. An example of an
Ackermann message type can be found
here.
This may satisfy your particular platform, and is only a starting point
on how to do this conversion.
If the platform computer is running a version of ROS 2:
| Requirement | |
|---|---|
| The platform computer has a ROS 2 to ROS 1 bridge is installed to enable the exchange of messages between the two ROS versions. |
Signature: Date:
Interface Control Validation Test
The following test is designed to validate the platforms velocity controller. It will be required that you command the robot to drive in three circles, of varying radii, by applying the following command to the platform.
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:
x: ___
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: ___"
The three trials that we request will vary between platforms depending on the its maximum linear and angular velocities , minimum linear and angular velocities , as well as limitations due to the minimum allowable turning radius . Of these three trials, we would like to see data within three linear velocity bands, as seen in the table below, resulting in three different turning radii. For the purpose of these tests, the following formula can be used when determining the required linear and angular velocities to apply: .
| Trial # | Linear X Bands [m/s] | Example Linear X Band [m/s] |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 |
As an example, a platform with specs , would have linear x velocity bands as listed in the table above. The trials could then be as outlined in the table below.
| Trial # | Linear X [m/s] | Angular Z [rad/s] | Turn Radius [m] |
|---|---|---|---|
| 1 | 0.75 | 0.25 | 3 |
| 2 | 2.25 | 0.5 | 4.5 |
| 3 | 4.5 | 0.75 | 6 |
Finally, the test data in the collected ROSbag should include the following:
/tfand/tf_static/platform/cmd_vel/platform/odom/cmd_vel/platform/emergency_stop(if available)- raw NavSatFix data from a GPS unit (if possible).