Starter Kit Hardware Checklist
The OutdoorNav Starter Hardware Kit from Clearpath Robotics contains:
- Ublox F9P GNSS
- Phidget Spatial 3/3/3 IMU
- RealSense D435f (x2) Depth Camera
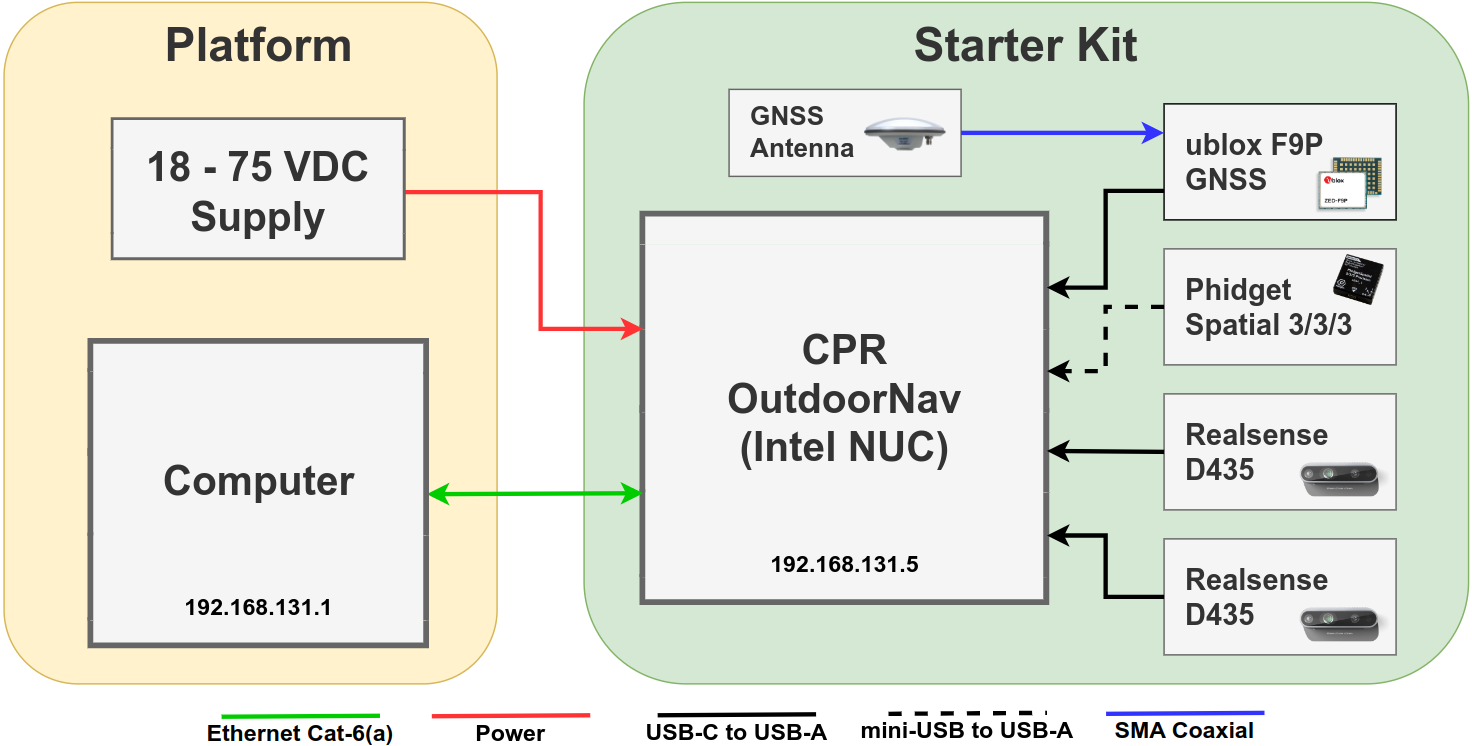
To integrate this kit onto your robot, ensure that all of the requirements below are satisfied for proper operation of the OutdoorNav software.
| Requirement | |
|---|---|
| The Starter Kit should be rigidly fixed to the UGV. Ie. It should not move or rotate relative to the UGVs base_link. | |
| Once mounted, the XYZ position of the Starter Kit frame relative to the base_link frame has been noted here: X: , Y: , Z: | |
| The Starter Kit is connected to the base robot computer via a gigabit ethernet cable (Cat6(a) minimum). | |
| The Starter Kit is power by an 18 - 75 V source supplied by the UGV. |
Should any of the external sensors positions need to be moved, the following constraints should be followed:
-
The GNSS antenna is to be placed upright, on an unobstructed part of the UGV with clear visibility.
-
The RealSense D435f cameras should be placed with a minimal amount of their field of view (FoV) obstructed by the UGV body.
The new XYZ position of the GNSS antenna and/or the Realsense D435f cameras relative to the Starter Kit Frame are noted below:
Sensor X Y Z R P Y GNSS Antenna 0.0 0.0 0.0 RealSense D435f (front) RealSense D435f (rear)
Signature: Date: