Assisted Teleoperation
The following Assisted Teleoperation feature is only available on our Jackal and Husky UGVs. It is not currently available on our Warthog UGV or on OEM platforms.
Making changes to any of the following variables will decrease system safety. It is recommended that users only modify these parameters in consultation with Clearpath Robotics Support.
Changes to any of the following variables will only take effect after power cycling the UGV.
As of version 0.12.0, the OutdoorNav software contains an assisted teleoperation feature that will help users teleoperate their UGV safely, without worry of colliding into obstacles.
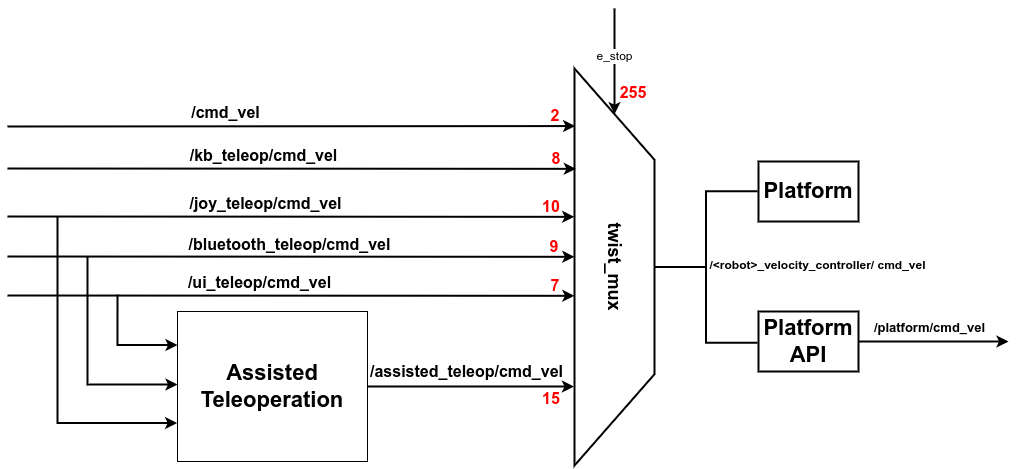
The assisted teleoperation feature is intended to work with the following sources of velocity input:
| Input source | Topic |
|---|---|
| UI Joystick | /ui_teleop/cmd_vel |
| PS4 Controlller | /bluetooth_teleop/cmd_vel or /joy_teleop/cmd_vel |
| Logitech Controller | /joy_teleop/cmd_vel |
The Assisted teleop feature will NOT work on the following sources of velocity input:
| Input source | Topic |
|---|---|
| External Command | /cmd_vel |
| Keyboard Command | /kb_teleop/cmd_vel |
| Interactive Marker | /twist_marker_server/cmd_vel |
The Assisted Teleoperation feature can be activated/deactivated according to your required application requirements.
This can be done by setting the ENABLE_ASSISTED_TELEOP environment variable in the
/opt/onav/<onav_version>/config/autonomy.env file, where onav_version
is the currently running version of OutdoorNav.
Functionality
The intended purpose for the assisted teleoperation feature is to provide some software level safety for users while they are teleoperating the UGV. This feature is intended to solely provide software level safety and does not use any hardware level PLCs to trigger a motor disconnect. It is to be treated as a tool that provides a sense of security to the user, such that they will not accidentally crash the UGV any obstacles. The feature constantly monitors the 2D/3D LiDAR sensor data that it is provided and uses this information to control the velocity of the UGV. As the UGV approaches obstacles, it will decrease the velocity of the UGV and will bring the UGV to a complete stop if the user continues to drive towards the oncoming obstacle.
For visualization details of the assisted teleoperation feature, please consult the UI Manual Mode page.
Enable/Disable from the UI
From the OutdoorNav UI you are able to enable/disable the "Teleop Assist" by using the toggle that is located by the UI joystick.
Enable/Disable using Joystick
To disable the "Teleop Assist" when driving the UGV with the PS4 or Logitech controllers, you will need to press and hold the following button:
| Controller Type | Button |
|---|---|
| PS4 controller | O |
| Logitech controller | B |
Error/Warnings
OutdoorNav will throw warnings and display them on the UI related to the status of the assisted teleoperation feature. Below are the errors/warnings you may see:
| Error/Warning | Reason |
|---|---|
| "Error: Failed to communicate with the Assisted Teleop node" | The assisted teleoperation node is not running or has crashed |
| "Error: No sensors configured" | The assisted teleoperation node is running but no sensors have been configured to be used as obstacle detection sources |
| "Error: Invalid twist_mux configuration" | The twists mux configuration has been modified and does not satisfy the requirements for safe operation under the requirements of assisted teleoperation |
| "Error: Unknown platform type" | The assisted teleoperation node cannot determine the type of platform you are on |
| "WARNING: Assisted teleoperation OFF due to service" | The UI toggle switch or the /assisted_teleop/enable service has disabled assisted teloperation |
| "WARNING: Assisted teleoperation OFF due to joystick override" | The enable/disable button on the UGV remote joystick has been pressed |
| "WARNING: Assisted teleoperation OFF due to sensor timeout" | Communication has been lost between the assisted teloperation node and one of the configured 2D/3D detection sensors. |
| "Warning: Robot is in a collision state and cannot be driven while assisted teleop is enabled. Please disable assisted teleop to recover." | The robot is is a state where is is too close to an obstacle. This will mostly occur when you are at a charge dock but may also occur if you are driving/rotating in a tight space. You may need to disable the Teleop Assist to continue remote operation |
Limitations
The assisted teleoperation features has similar limitations to those of our collision avoidance features. Performance degradation will be experiences in rain and/or snow conditions, as well as in tall grass environments. The assisted teleoperation feature also only work if obstacles are detected by the 3D sensors. If obstacles appear in any of the UGVs blind spots, the assisted teleoperation feature will not prevent collision with these obstacles.