Network of Paths
Overview
Network of paths uses a directed graph to define the robot's valid driving area. When executing a mission the robot plans its route to follow the edges of the graph to get from waypoint to waypoint. The exact route taken is dynamic and may change depending on the robot's exact starting location, detected obstacles along some edges, and the geometry of the graph itself.
All services in the mission_manager namespace are provided by OutdoorNav's misssion_manager node. This node is part
of the autonomy docker service.
Creating a map
To create a map, use the /mission_manager/create_network_map service:
#!/usr/bin/env python3
import rospy
from clearpath_mission_manager_msgs.srv import *
rospy.init_node("map_maker_example")
map_maker_service = rospy.ServiceProxy("/mission_manager/create_network_map", CreateNetworkMap)
map = map_maker_service("Example Map", 2.5, 1.0, [], []).result
print(map)
This program produces an empty map with an automatically generated UUID:
name: "Example Map"
uuid: "c7c6bd2e-06dd-4f61-9ab0-f81fa896a915"
default_radius: 2.5
default_speed_limit: 1.0
points: []
connections: []
From here you can use the /mission_manager/add_network_point and /mission_manager/add_network_edge services to
add vertices and connect them. However, this can be very slow if your map is large. A faster way is to include the
vertices and edges in the request to create the map:
#!/usr/bin/env python3
import rospy
from clearpath_mission_manager_msgs.msg import *
from clearpath_mission_manager_msgs.srv import *
from clearpath_navigation_msgs.msg import *
# A tuple of (TAG, longitude, latitude, altitude), copied from a Google Earth KML file
# Tags are added manually to identify each coordinate
# The tag is used as a placeholder for the generated UUIDs to simplify defining the edges ourselves
COORDINATES = [
("A", -97.28322817327727,50.12300747122199,0),
("B", -97.28217525643019,50.12171056479555,0), # the first intersection, connects to C and L
("C", -97.28326793963477,50.11981930442499,0), # the second intersection, connects to D and H
("D", -97.28483408203536,50.11926816962462,0),
("E", -97.28486964915798,50.11761512315844,0),
("F", -97.28166555083155,50.11758334859005,0),
("G", -97.28229122963415,50.11952637327663,0),
("H", -97.28167846932446,50.11913714171172,0), # the third intersection, connects to I and C
# A dead-end side-branch
("I", -97.28219097560832,50.11973533270263,0), # forks from H
("J", -97.28249905504131,50.1199092365631,0),
("K", -97.28242834054022,50.12013941719884,0),
# Another dead-end side-branch
("L", -97.28242899160524,50.12209511863426,0), # forks from B
("M", -97.28246941874356,50.12229616417419,0),
("N", -97.28325139122391,50.12230651895854,0),
]
DEFAULT_RADIUS = 2.5
DEFAULT_SPEED_LIMIT = 1.0
rospy.init_node("map_maker_example_2")
map_maker_service = rospy.ServiceProxy("/mission_manager/create_network_map", CreateNetworkMap)
map = map_maker_service(
"Example Map", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT,
# The vertices
# This is just a simple array of NetworkPoint objects. Each must have a unique ID, a one-letter tag in this
# example
[
NetworkPoint(c[1], c[0], c[2]) for c in COORDINATES # Note that NetworkPoint uses latitude first!
],
# The edges. This defines the geometry of the map
# Edges are unidirectional, so we must manually add edges going in both directions where necessary
[
NetworkEdgeReq("A", "B", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("B", "A", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("B", "C", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("C", "B", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("C", "D", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("D", "C", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("D", "E", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("E", "D", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("E", "F", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("F", "E", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("F", "G", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("G", "F", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("G", "H", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("H", "G", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("H", "C", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT), # end of the main road & loop
NetworkEdgeReq("H", "C", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("H", "I", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("I", "H", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("I", "J", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("J", "I", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("J", "K", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("K", "J", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT), # end of one fork
NetworkEdgeReq("B", "L", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("L", "B", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("L", "M", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("M", "L", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("M", "N", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
NetworkEdgeReq("N", "M", DEFAULT_RADIUS, DEFAULT_SPEED_LIMIT),
]
).result
print(map)
The program's output looks like this:
name: "Example Map"
uuid: "3b3bed4e-bcfb-40d4-bc2e-3d5e904890cf"
default_radius: 2.5
default_speed_limit: 1.0
points:
-
uuid: "1bef3d7d-3ead-49c7-9306-ede6c4030ebb"
latitude: 50.12300747122199
longitude: -97.28322817327727
-
uuid: "a56eb1c5-3bee-4d4a-84e0-780651db67cd"
latitude: 50.12171056479555
longitude: -97.2821752564302
-
uuid: "1efac02f-8dfc-4826-a4cc-894d2cac16f9"
latitude: 50.11981930442499
longitude: -97.28326793963477
-
uuid: "7bd501a1-ef93-46b9-a440-213755522954"
latitude: 50.11926816962462
longitude: -97.28483408203536
-
uuid: "9e6c1b11-8430-4986-9091-da440b57df85"
latitude: 50.11761512315844
longitude: -97.28486964915798
-
uuid: "7a0d3f02-85c3-4907-9bb8-0b2245736b9b"
latitude: 50.11758334859005
longitude: -97.28166555083155
-
uuid: "0b289f8f-86b8-413f-b35e-cadbd5c4ef31"
latitude: 50.11952637327663
longitude: -97.28229122963415
-
uuid: "6db9a882-d40b-4050-ad60-3947c4a936d0"
latitude: 50.11913714171172
longitude: -97.28167846932446
-
uuid: "05b6fb7f-b071-4aa2-b253-1fdf942097c9"
latitude: 50.11973533270263
longitude: -97.28219097560832
-
uuid: "e77610aa-132d-45b1-83e2-0f8c9b5eafff"
latitude: 50.1199092365631
longitude: -97.28249905504131
-
uuid: "8a013830-fb3a-4225-84d3-946810dede60"
latitude: 50.12013941719884
longitude: -97.28242834054022
-
uuid: "d42dd9ce-dc49-4226-ab28-18ac644da0f6"
latitude: 50.12209511863426
longitude: -97.28242899160524
-
uuid: "aa198f25-78b5-48e0-a9df-750ffb4080a5"
latitude: 50.12229616417419
longitude: -97.28246941874356
-
uuid: "4d6addba-73f4-4373-8e3c-0f7caf155283"
latitude: 50.12230651895854
longitude: -97.28325139122391
connections:
-
uuid: "9152c6ee-6cb0-4a6a-a1a3-a156c137e10b"
start_point:
uuid: "1bef3d7d-3ead-49c7-9306-ede6c4030ebb"
latitude: 50.12300747122199
longitude: -97.28322817327727
end_point:
uuid: "a56eb1c5-3bee-4d4a-84e0-780651db67cd"
latitude: 50.12171056479555
longitude: -97.2821752564302
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "af77ee8c-9460-4c4a-bb23-d8eab4877bd8"
start_point:
uuid: "a56eb1c5-3bee-4d4a-84e0-780651db67cd"
latitude: 50.12171056479555
longitude: -97.2821752564302
end_point:
uuid: "1bef3d7d-3ead-49c7-9306-ede6c4030ebb"
latitude: 50.12300747122199
longitude: -97.28322817327727
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "077e176e-531a-4afa-9c55-48496ddb19a3"
start_point:
uuid: "a56eb1c5-3bee-4d4a-84e0-780651db67cd"
latitude: 50.12171056479555
longitude: -97.2821752564302
end_point:
uuid: "1efac02f-8dfc-4826-a4cc-894d2cac16f9"
latitude: 50.11981930442499
longitude: -97.28326793963477
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "8f605876-10d0-43bf-ade3-4acec11b90a4"
start_point:
uuid: "1efac02f-8dfc-4826-a4cc-894d2cac16f9"
latitude: 50.11981930442499
longitude: -97.28326793963477
end_point:
uuid: "a56eb1c5-3bee-4d4a-84e0-780651db67cd"
latitude: 50.12171056479555
longitude: -97.2821752564302
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "98cdf58f-76d1-4b00-8119-44850b20c006"
start_point:
uuid: "1efac02f-8dfc-4826-a4cc-894d2cac16f9"
latitude: 50.11981930442499
longitude: -97.28326793963477
end_point:
uuid: "7bd501a1-ef93-46b9-a440-213755522954"
latitude: 50.11926816962462
longitude: -97.28483408203536
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "94f20e66-aea9-4ea8-8029-31eba37ba800"
start_point:
uuid: "7bd501a1-ef93-46b9-a440-213755522954"
latitude: 50.11926816962462
longitude: -97.28483408203536
end_point:
uuid: "1efac02f-8dfc-4826-a4cc-894d2cac16f9"
latitude: 50.11981930442499
longitude: -97.28326793963477
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "356d56a0-1165-48ef-87ab-b3e289b6d275"
start_point:
uuid: "7bd501a1-ef93-46b9-a440-213755522954"
latitude: 50.11926816962462
longitude: -97.28483408203536
end_point:
uuid: "9e6c1b11-8430-4986-9091-da440b57df85"
latitude: 50.11761512315844
longitude: -97.28486964915798
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "40438b94-fd92-4e95-bb31-1737d235c8ca"
start_point:
uuid: "9e6c1b11-8430-4986-9091-da440b57df85"
latitude: 50.11761512315844
longitude: -97.28486964915798
end_point:
uuid: "7bd501a1-ef93-46b9-a440-213755522954"
latitude: 50.11926816962462
longitude: -97.28483408203536
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "97e40361-123c-4f33-9dae-3bd293d5a001"
start_point:
uuid: "9e6c1b11-8430-4986-9091-da440b57df85"
latitude: 50.11761512315844
longitude: -97.28486964915798
end_point:
uuid: "7a0d3f02-85c3-4907-9bb8-0b2245736b9b"
latitude: 50.11758334859005
longitude: -97.28166555083155
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "5ca07677-1ec9-4355-bfdb-f04801d18feb"
start_point:
uuid: "7a0d3f02-85c3-4907-9bb8-0b2245736b9b"
latitude: 50.11758334859005
longitude: -97.28166555083155
end_point:
uuid: "9e6c1b11-8430-4986-9091-da440b57df85"
latitude: 50.11761512315844
longitude: -97.28486964915798
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "ac299ea0-18f0-42ed-ab82-01c4789c979d"
start_point:
uuid: "7a0d3f02-85c3-4907-9bb8-0b2245736b9b"
latitude: 50.11758334859005
longitude: -97.28166555083155
end_point:
uuid: "0b289f8f-86b8-413f-b35e-cadbd5c4ef31"
latitude: 50.11952637327663
longitude: -97.28229122963415
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "754ad065-c3e8-41de-b0c2-a32e7247db40"
start_point:
uuid: "0b289f8f-86b8-413f-b35e-cadbd5c4ef31"
latitude: 50.11952637327663
longitude: -97.28229122963415
end_point:
uuid: "7a0d3f02-85c3-4907-9bb8-0b2245736b9b"
latitude: 50.11758334859005
longitude: -97.28166555083155
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "dcd5ca9f-5ad7-4404-a6a2-c5ab8b3bb0f5"
start_point:
uuid: "0b289f8f-86b8-413f-b35e-cadbd5c4ef31"
latitude: 50.11952637327663
longitude: -97.28229122963415
end_point:
uuid: "6db9a882-d40b-4050-ad60-3947c4a936d0"
latitude: 50.11913714171172
longitude: -97.28167846932446
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "66884078-ab62-439b-be51-3446cf92809e"
start_point:
uuid: "6db9a882-d40b-4050-ad60-3947c4a936d0"
latitude: 50.11913714171172
longitude: -97.28167846932446
end_point:
uuid: "0b289f8f-86b8-413f-b35e-cadbd5c4ef31"
latitude: 50.11952637327663
longitude: -97.28229122963415
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "948eca22-3bf2-443a-b117-a551c6503c2a"
start_point:
uuid: "6db9a882-d40b-4050-ad60-3947c4a936d0"
latitude: 50.11913714171172
longitude: -97.28167846932446
end_point:
uuid: "1efac02f-8dfc-4826-a4cc-894d2cac16f9"
latitude: 50.11981930442499
longitude: -97.28326793963477
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "9e445547-0e42-4ba4-8411-6228288d3ae8"
start_point:
uuid: "6db9a882-d40b-4050-ad60-3947c4a936d0"
latitude: 50.11913714171172
longitude: -97.28167846932446
end_point:
uuid: "1efac02f-8dfc-4826-a4cc-894d2cac16f9"
latitude: 50.11981930442499
longitude: -97.28326793963477
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "d15e27d7-e4aa-479c-b9bf-705c70ccbdfc"
start_point:
uuid: "6db9a882-d40b-4050-ad60-3947c4a936d0"
latitude: 50.11913714171172
longitude: -97.28167846932446
end_point:
uuid: "05b6fb7f-b071-4aa2-b253-1fdf942097c9"
latitude: 50.11973533270263
longitude: -97.28219097560832
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "1295c8da-65df-4b5b-a214-f7579ad7179d"
start_point:
uuid: "05b6fb7f-b071-4aa2-b253-1fdf942097c9"
latitude: 50.11973533270263
longitude: -97.28219097560832
end_point:
uuid: "6db9a882-d40b-4050-ad60-3947c4a936d0"
latitude: 50.11913714171172
longitude: -97.28167846932446
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "be0f8c9f-0f42-4f9a-9140-050ac617cd10"
start_point:
uuid: "05b6fb7f-b071-4aa2-b253-1fdf942097c9"
latitude: 50.11973533270263
longitude: -97.28219097560832
end_point:
uuid: "e77610aa-132d-45b1-83e2-0f8c9b5eafff"
latitude: 50.1199092365631
longitude: -97.28249905504131
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "6b1a04c8-e5d9-441d-b7d2-5426070d210f"
start_point:
uuid: "e77610aa-132d-45b1-83e2-0f8c9b5eafff"
latitude: 50.1199092365631
longitude: -97.28249905504131
end_point:
uuid: "05b6fb7f-b071-4aa2-b253-1fdf942097c9"
latitude: 50.11973533270263
longitude: -97.28219097560832
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "bee2318d-0e19-427b-aa15-a5aa195212be"
start_point:
uuid: "e77610aa-132d-45b1-83e2-0f8c9b5eafff"
latitude: 50.1199092365631
longitude: -97.28249905504131
end_point:
uuid: "8a013830-fb3a-4225-84d3-946810dede60"
latitude: 50.12013941719884
longitude: -97.28242834054022
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "159619a1-9a8e-41d0-b41b-918b187ac70c"
start_point:
uuid: "8a013830-fb3a-4225-84d3-946810dede60"
latitude: 50.12013941719884
longitude: -97.28242834054022
end_point:
uuid: "e77610aa-132d-45b1-83e2-0f8c9b5eafff"
latitude: 50.1199092365631
longitude: -97.28249905504131
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "79e510bd-5f24-4251-9169-995f30212966"
start_point:
uuid: "a56eb1c5-3bee-4d4a-84e0-780651db67cd"
latitude: 50.12171056479555
longitude: -97.2821752564302
end_point:
uuid: "d42dd9ce-dc49-4226-ab28-18ac644da0f6"
latitude: 50.12209511863426
longitude: -97.28242899160524
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "720679a5-2eda-4f21-b430-9ea34be3076d"
start_point:
uuid: "d42dd9ce-dc49-4226-ab28-18ac644da0f6"
latitude: 50.12209511863426
longitude: -97.28242899160524
end_point:
uuid: "a56eb1c5-3bee-4d4a-84e0-780651db67cd"
latitude: 50.12171056479555
longitude: -97.2821752564302
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "40fdd435-c7da-4e91-895b-e3dd3c872dbd"
start_point:
uuid: "d42dd9ce-dc49-4226-ab28-18ac644da0f6"
latitude: 50.12209511863426
longitude: -97.28242899160524
end_point:
uuid: "aa198f25-78b5-48e0-a9df-750ffb4080a5"
latitude: 50.12229616417419
longitude: -97.28246941874356
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "fff60db8-90ce-484b-ba44-a0637263f727"
start_point:
uuid: "aa198f25-78b5-48e0-a9df-750ffb4080a5"
latitude: 50.12229616417419
longitude: -97.28246941874356
end_point:
uuid: "d42dd9ce-dc49-4226-ab28-18ac644da0f6"
latitude: 50.12209511863426
longitude: -97.28242899160524
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "995875bd-55dd-418b-81cc-72f3d957d119"
start_point:
uuid: "aa198f25-78b5-48e0-a9df-750ffb4080a5"
latitude: 50.12229616417419
longitude: -97.28246941874356
end_point:
uuid: "4d6addba-73f4-4373-8e3c-0f7caf155283"
latitude: 50.12230651895854
longitude: -97.28325139122391
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
-
uuid: "9fc59ccd-75a7-4b0a-ab3e-d3c6e9bd9fb9"
start_point:
uuid: "4d6addba-73f4-4373-8e3c-0f7caf155283"
latitude: 50.12230651895854
longitude: -97.28325139122391
end_point:
uuid: "aa198f25-78b5-48e0-a9df-750ffb4080a5"
latitude: 50.12229616417419
longitude: -97.28246941874356
radius: 1.0
speed_limit: 2.5
cost_factor: 1.0
Note that in the process of creating the map, all of the points' UUIDs have been regenerated. This is to ensure that all points saved on the robot have unique identifiers.
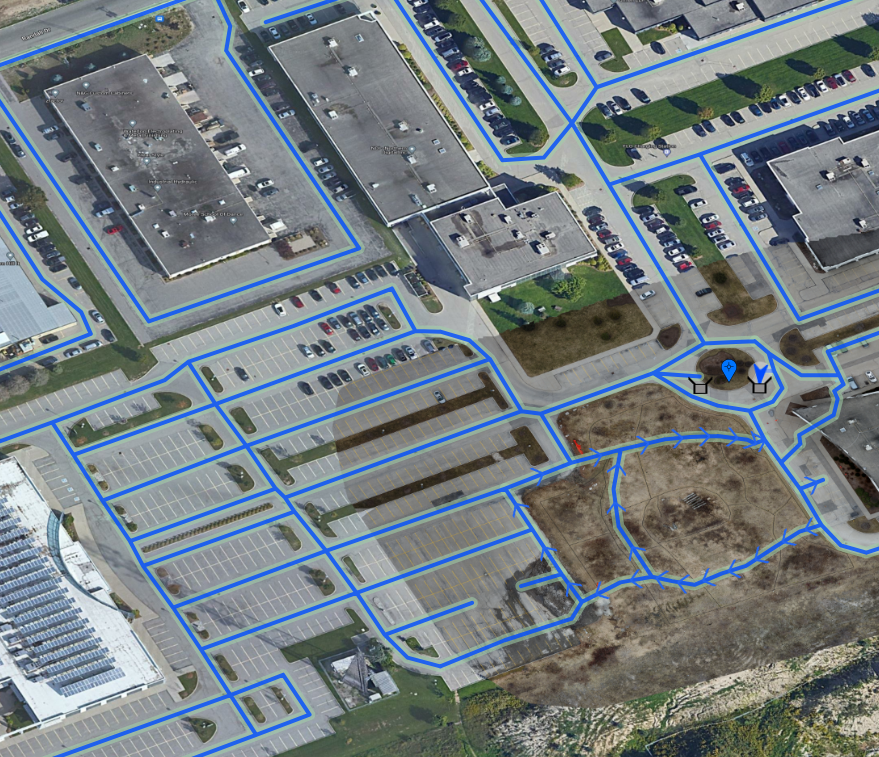
Getting the coordinates for vertices
The coordinates for the vertices in the example above were generated by drawing the desired paths using Google Earth's path tool. The project was exported as a KML file, which can be opened in a text editor:
<?xml version="1.0" encoding="UTF-8"?>
<kml xmlns="http://www.opengis.net/kml/2.2" xmlns:gx="http://www.google.com/kml/ext/2.2" xmlns:kml="http://www.opengis.net/kml/2.2" xmlns:atom="http://www.w3.org/2005/Atom">
<Document>
<name>Untitled</name>
<gx:CascadingStyle kml:id="__managed_style_1EF00888ED2FB5E604EF">
<Style>
<IconStyle>
<Icon>
<href>https://earth.google.com/earth/rpc/cc/icon?color=1976d2&id=2000&scale=4</href>
</Icon>
<hotSpot x="64" y="128" xunits="pixels" yunits="insetPixels"/>
</IconStyle>
<LabelStyle>
</LabelStyle>
<LineStyle>
<color>ff2dc0fb</color>
<width>4</width>
</LineStyle>
<PolyStyle>
<color>40ffffff</color>
</PolyStyle>
<BalloonStyle>
<displayMode>hide</displayMode>
</BalloonStyle>
</Style>
</gx:CascadingStyle>
<gx:CascadingStyle kml:id="__managed_style_2832AC86D92FB5E604EF">
<Style>
<IconStyle>
<scale>1.2</scale>
<Icon>
<href>https://earth.google.com/earth/rpc/cc/icon?color=1976d2&id=2000&scale=4</href>
</Icon>
<hotSpot x="64" y="128" xunits="pixels" yunits="insetPixels"/>
</IconStyle>
<LabelStyle>
</LabelStyle>
<LineStyle>
<color>ff2dc0fb</color>
<width>6</width>
</LineStyle>
<PolyStyle>
<color>40ffffff</color>
</PolyStyle>
<BalloonStyle>
<displayMode>hide</displayMode>
</BalloonStyle>
</Style>
</gx:CascadingStyle>
<StyleMap id="__managed_style_08F931B1C22FB5E604EF">
<Pair>
<key>normal</key>
<styleUrl>#__managed_style_1EF00888ED2FB5E604EF</styleUrl>
</Pair>
<Pair>
<key>highlight</key>
<styleUrl>#__managed_style_2832AC86D92FB5E604EF</styleUrl>
</Pair>
</StyleMap>
<Placemark id="00CEDFEAA82F6E7DC6A6">
<name>Main Path</name>
<LookAt>
<longitude>-97.28114320519418</longitude>
<latitude>50.1207190898435</latitude>
<altitude>255.3655780539208</altitude>
<heading>1.174355479883316</heading>
<tilt>0</tilt>
<gx:fovy>35</gx:fovy>
<range>1653.897493233089</range>
<altitudeMode>absolute</altitudeMode>
</LookAt>
<styleUrl>#__managed_style_08F931B1C22FB5E604EF</styleUrl>
<LineString>
<coordinates>
-97.28322817327727,50.12300747122199,0 -97.28326793963477,50.11981930442499,0 -97.28483408203536,50.11926816962462,0 -97.28486964915798,50.11761512315844,0 -97.28166555083155,50.11758334859005,0 -97.28167846932446,50.11913714171172,0 -97.28229122963415,50.11952637327663,0 -97.28219097560832,50.11973533270263,0 -97.28249905504131,50.1199092365631,0 -97.28242834054022,50.12013941719884,0
</coordinates>
</LineString>
</Placemark>
<Placemark id="0DDE7678C62F6E7DF885">
<name>Side Path</name>
<LookAt>
<longitude>-97.28114320516248</longitude>
<latitude>50.1207190898435</latitude>
<altitude>255.3655780539208</altitude>
<heading>1.174355479883316</heading>
<tilt>0</tilt>
<gx:fovy>35</gx:fovy>
<range>1653.897493233089</range>
<altitudeMode>absolute</altitudeMode>
</LookAt>
<styleUrl>#__managed_style_08F931B1C22FB5E604EF</styleUrl>
<LineString>
<coordinates>
-97.28217525643019,50.12171056479555,0 -97.28242899160524,50.12209511863426,0 -97.28246941874356,50.12229616417419,0 -97.28325139122391,50.12230651895854,0
</coordinates>
</LineString>
</Placemark>
</Document>
</kml>

The <coordinate> tags contain space-separated lists of the form lon_0,lat_0,alt_0 lon_1,lat_1,alt_1 lon_2,lat_2,alt_2 ....
By copying these lists into Python and converting them to Lists or Tuples you can create the lists of coordinates:
# KML coordinates:
# <coordinates>
# -97.28217525643019,50.12171056479555,0 -97.28242899160524,50.12209511863426,0 -97.28246941874356,50.12229616417419,0 -97.28325139122391,50.12230651895854,0
# </coordinates>
lon_lat_alt = [
(-97.28217525643019, 50.12171056479555, 0),
(-97.28242899160524, 50.12209511863426, 0),
(-97.28246941874356, 50.12229616417419, 0),
(-97.28325139122391, 50.12230651895854, 0)
]
Executing a mission
To execute a Network of Paths mission, you need to know the UUID of the mission to execute and the UUID of the map. The UUIDs are generated when the objects are created, so you may need to search the available objects to determine the appropriate mission & map if you have more than one.
from clearpath_mission_manager_msgs.msg import *
from clearpath_mission_manager_msgs.srv import *
import actionlib
import rospy
# 1) Get all of the Network of Paths maps and missions from the mission manager
all_maps_srv = rospy.ServiceProxy("/mission_manager/get_all_network_maps", GetAllNetworkMaps)
all_missions_srv = rospy.ServiceProxy("/mission_manager/get_all_network_missions", GetAllNetworkMissions)
maps = all_maps_srv()
missions = all_missions_srv()
# Do a simple search for the map with the desired name
# You can replace the name, or search for any other attribute of the NetworkMap object
map = None
for m in maps:
if m.name == "My Map":
map = m
break
# As above, but looking for the desired mission instead of the desired map
mission = None
for m in missions:
if m.name == "My Mission":
mission = m
break
# we have the map & the mission; we can run the mission
if map and mission:
# 1) create the actionlib client
mission_execution_client = actionlib.SimpleActionClient("/autonomy/network_mission", ExecuteNetworkMissionByUuidAction)
# 2) create the goal
goal = ExecuteNetworkMissionByUuidGoal(mission.uuid, map.uuid)
# 3) send the goal to the server
mission_execution_client.send_goal(goal)
# 4) Wait for the mission to finish executing
mission_execution_client.wait_for_result()