Visualizing with RViz2
RViz is a very useful tool for visualizing the robot model and the robot sensor data. RViz must be launched on a computer that has a desktop manager and display. This means that it will not run on standard Clearpath robots since they run Ubuntu Server rather than Ubuntu Desktop.
Installation
Follow the offboard computer setup instructions to ensure that the computer has the required packages and files.
Launch Options
Several launch files are provided to serve different use cases:
View Model
This launch file is used to visualize the robot model without needing a robot present or connected. For usage details, see Live Configuration
View Robot
ros2 launch clearpath_viz view_robot.launch.py namespace:=a200_0000 setup_path:=SETUP_PATH
Replace
SETUP_PATHwith the path to the directory where therobot.yamlis located.
Do not include
~in theSETUP_PATH, use$HOMEinstead.
Make sure that
SETUP_PATHends with/.
If following the offboard computer setup instructions, this will be
$HOME/clearpath.
This launch file should be used when visualizing the robot while connected to the robot (wired or wirelessly). This will subscribe to topics from the robot to populate the visualization. Update the namespace parameter to match the robot's namespace.
View Navigation
ros2 launch clearpath_viz view_navigation.launch.py namespace:=a200_0000
This launch file should be used when visualizing the robot with nav2 operating. This will subscribe to both robot and nav2 topics to populate the robot within the context of a map. Update the namespace parameter to match the robot's namespace.
View Manipulators
This launch file is used to view the robot when there is a manipulator attached, and allows interacting with MoveIt. For usage details, see Manipulation Demo
The GUI
Once RViz loads, the model should be shown in the main view as shown below. Note that if the robot has been driven around then it may no longer be visible in the initial view, but panning can be used to navigate to the robot by following the line connecting the origin of the fixed frame to the robot.
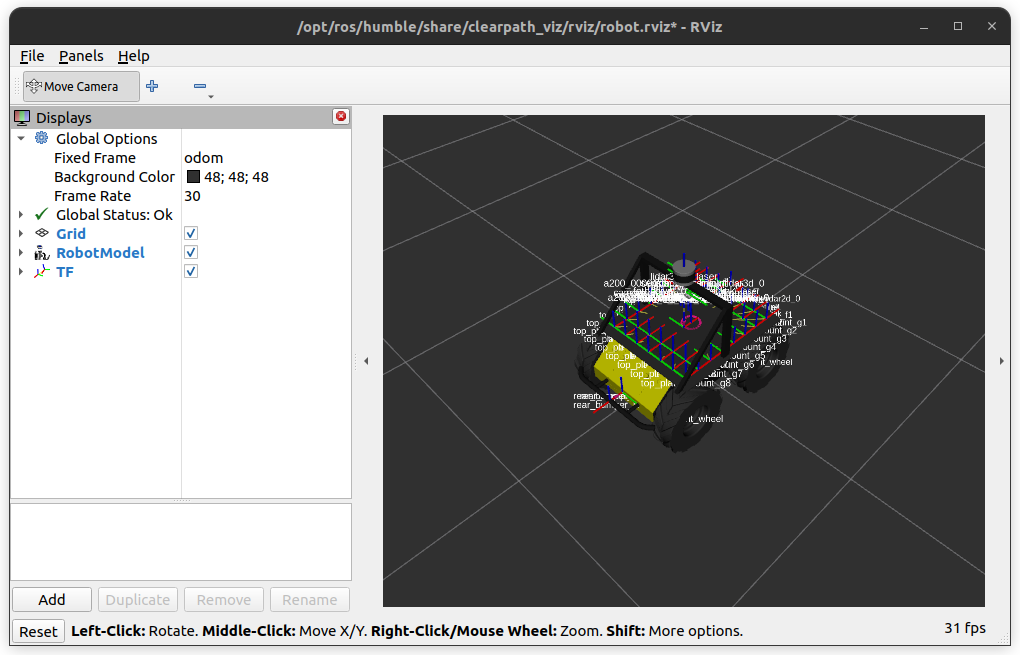
The fixed frame refers to which frame will remain stationary in the visualization. Selecting odom means that the robot will move within the RViz screen when it drives. In contrast, selecting base_link will keep the robot fixed and the environment / sensor data will move around the robot in the RViz screen.
The visualization can appear very cluttered with many frame coordinates labelled and visualized. These can be individually disabled using the various checkboxes under TF and TF -> Frames in the Displays panel on the left of the screen.
Visualizing Sensor Data
To add additional data to be visualized, press the Add button in the bottom left.
It is recommended to add the visualization By topic. This view shows the topics that are available to be displayed. Navigate through the folder structure, select the desired topic and press Ok.
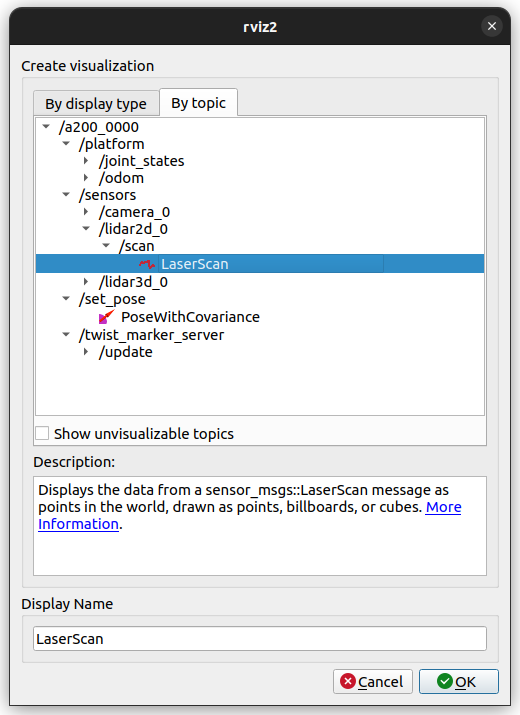
If a topic is available to be echoed but does not show up in this list it generally means that the topic became available after the pop up was opened or that the topic is not in a format that is compatible with RViz.
In the case of this example, a LaserScan topic was selected. LaserScan topics by default are displayed as small red dots around the robot as shown below:
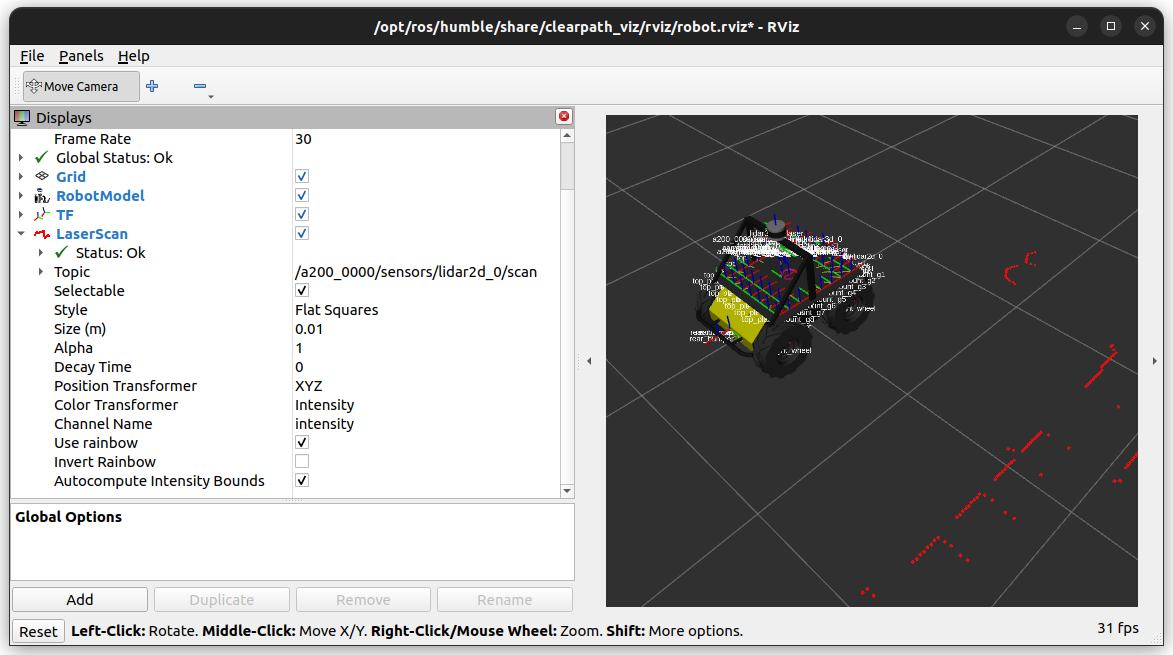
The Displays panel on the left allows several settings to be changed, including enabling / disabling the visualization and modifying how the data is displayed.
Visualizing Camera Data
Certain types of data require additional steps for display. RViz currently only supports the visualization of raw decoded images. If the images or videos are encoded for transmission (such as the ffmpeg or compressed topics), a decoder node must be launched locally to decode the images for display.
See Camera Data Compression for how to launch a decoder node.
Once the decoded image topic is available, select it for display and select the Image plugin option.
Visualizing IMU Data
Viewing IMU data in RViz requires the RViz IMU Plugin. Install it by running:
sudo apt install ros-$ROS_DISTRO-imu-tools
Once the plugin is installed, select the IMU topic for display in RViz just like any other topic.
Troubleshooting
The following are some common issues faced when using RViz.
RViz is blank
RViz opens with no model or silhouette displayed.
This is most commonly caused by RViz not having any connection to the robot or the robot topics. Check to make sure that the /<namespace>/tf topic (where <namespace> is the robot's namespace) is able to be echoed and that RViz was launched with the correct namespace.
Robot White Silhouette
The robot model does not show up in RViz, instead showing a white silhouette.
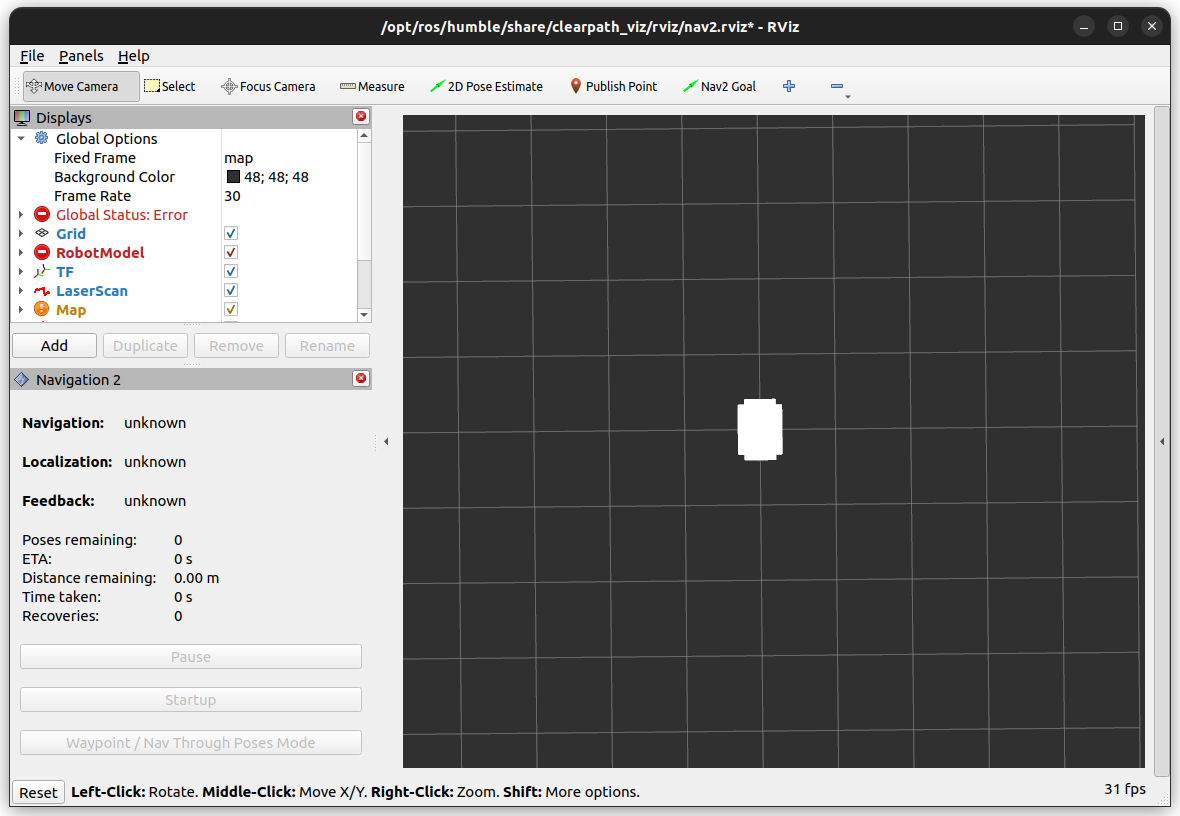
This can be caused by the robot TF being present but the reference frame listed under Fixed Frame not being present. This most commonly happens when the view_navigation launch is used while neither SLAM nor localization are running and therefore the map frame either does not exist or is not connected to the rest of the TF tree. Either switch the Fixed Frame, use the correct launch file, or address why SLAM or localization are not running.