Driving a Robot
Make sure you have successfully set up the robot before attempting to drive it.
There are several ways to drive a Clearpath robot using ROS 2.
Joystick Teleoperation
Make sure your controller is paired to the robot computer. Visit the controller pairing guide for details.
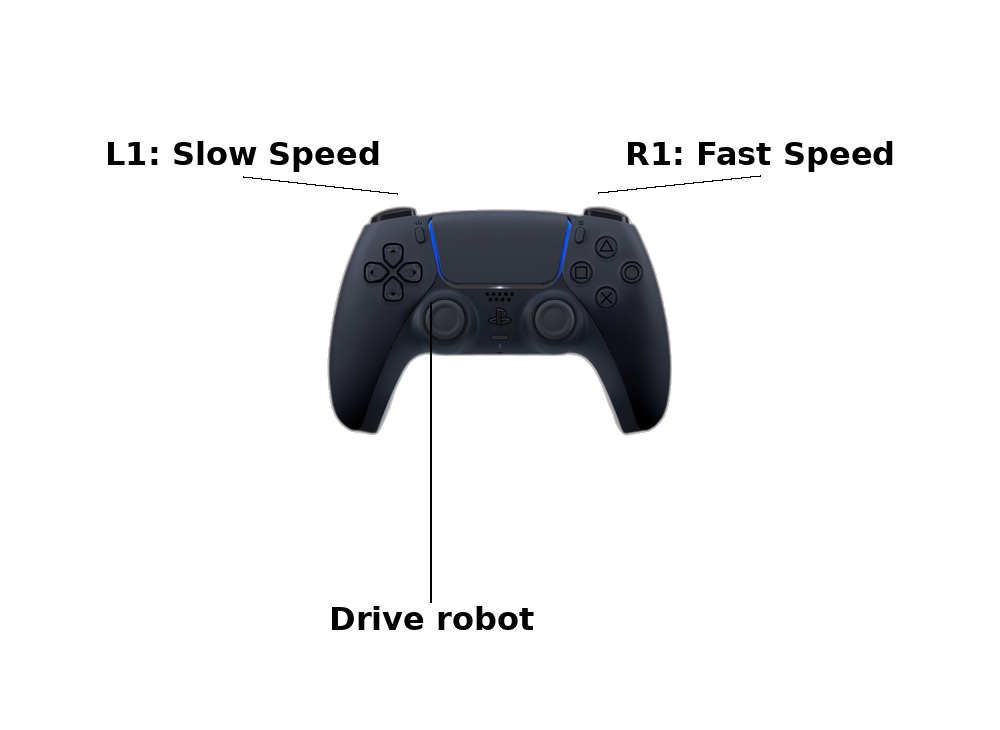
With the robot services running, turn on your controller. Press and hold either L1 or R1, and use the left joystick to publish a linear velocity and yaw command. The L1 button will drive the robot at slow speeds, while R1 will drive the robot at fast speeds (only supported on some robots).
- PS4 Controller
- PS5 Controller

Keyboard Teleoperation
Install the teleop_twist_keyboard ROS 2 package on the robot computer or on an offboard computer:
sudo apt update
sudo apt install ros-jazzy-teleop-twist-keyboard
Once installed, run the node:
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -p stamped:=true
If your robot uses a namespace, the namespace should be applied to teleop_twist_keyboard:
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -p stamped:=true -r __ns:=/j100_0001
Command Velocity
You can manually publish to the cmd_vel topic through the command line by calling:
ros2 topic pub /cmd_vel geometry_msgs/msg/TwistStamped \
"twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
Set the linear.x value to drive the robot forwards or backwards, and the angular.z value to rotate left or right.