Web UI Waypoint Mode
Ensure that the Safety document has been read and the user is aware of possible hazards when using this product as well as the safety methods that can be used to stop the moving UGV.
The Autonomous Mode of OutdoorNav Software is a set of robotic navigation modules that enables robotics developers to define and then autonomously execute missions on UGVs, getting work done without requiring direct operator action. This software is composed of four main modules: localization, navigation, safety monitoring and user control unit. This a combination of Clearpath's proprietary packages and custom configured open-source packages from ROS community. Please see the software architecture section for more information.
Definitions
The list below defines what a "Mission" is as well as its components. These components are referred to throughout this manual.
- Mission A Mission is a set of one or more Waypoints.
- Path The list of Waypoints that will determine the path for the specific Mission.
- Waypoint A Waypoint is any geographical point referenced by its position relative to the datum in meters.
- Task A Task is an automated activity or wait time implemented as a ROS action at a specific Waypoint. Tasks are called in the order they are added to a Waypoint.
- Ghost Waypoint A transparent waypoint that is not part of the mission. This Waypoint appears between two other waypoints when in edit mode. The user can drag and drop this ghost waypoint to add a new waypoint to the mission between the other two waypoints.
Mission Creation
To create a new Mission first ensure that the UI is in "Waypoint Edit Mode" (open the map edit modes and select the waypoint icon). Then open the drop down menu in the bottom bar and select the "Add Mission" option. This will allow the user to create a new Mission which can then be defined with Waypoints. If there are no missions presently in the system a user can start adding waypoints directly. This will create a new mission named "Mission - [Current Date]" which can be changed later in the waypoint table.
Waypoint Mode
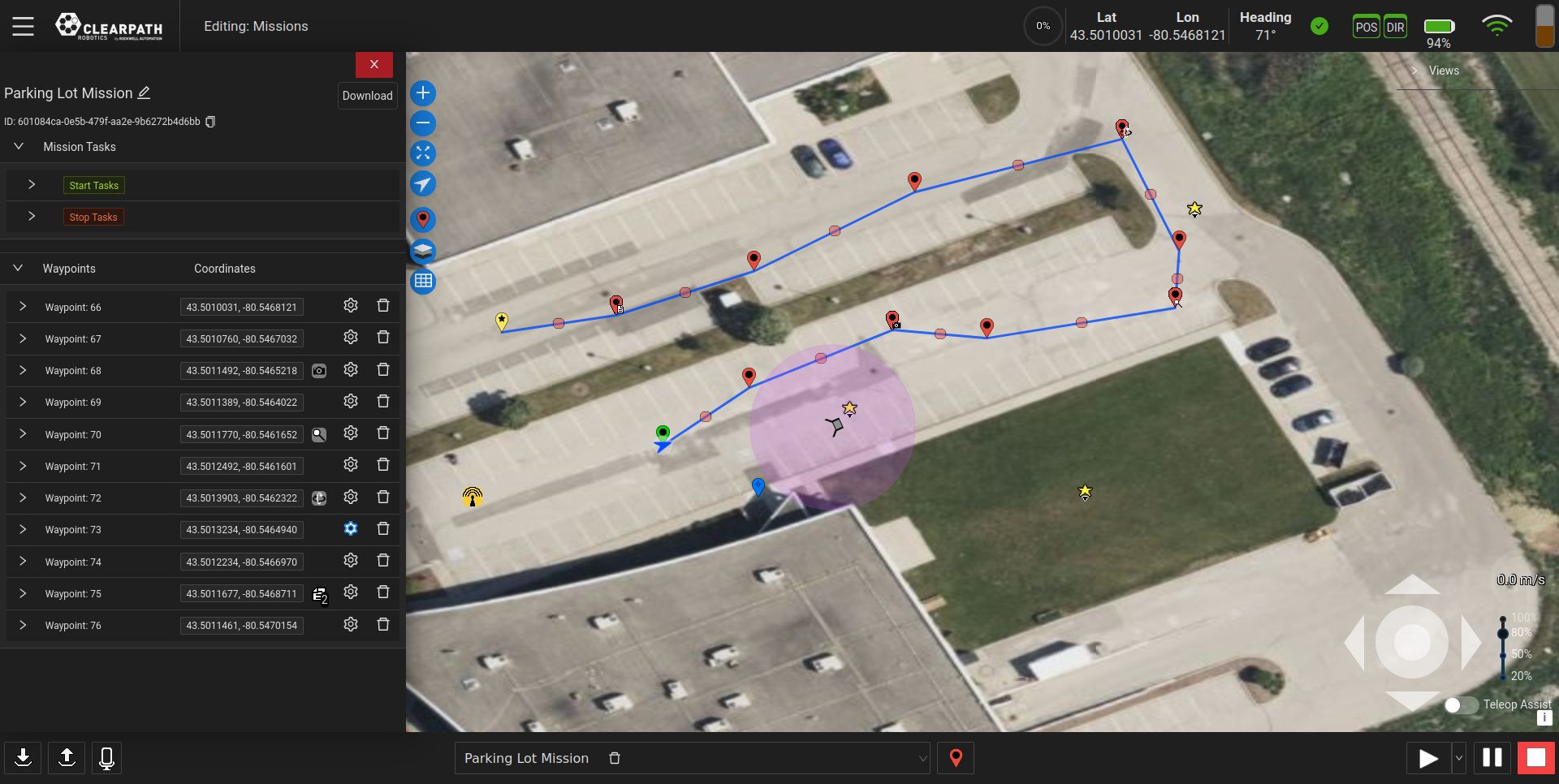
To add new Waypoints to a Mission while edit mode is enabled simply click on the map where the waypoint needs to be. These will appear as red Waypoints with the exception of the first waypoint (green) and the last waypoint (yellow).
When running a mission the first Waypoint must be within 3.0 meters of the UGV's current position.
As Waypoints are placed, a "ghost waypoint" will appear between each pair of real Waypoints and can be dragged to a new spot to insert a real Waypoint between them. Waypoints can also be dragged and dropped on the map to modify their positions.
Waypoint Panel
Enable the "Waypoint Panel" toggle to open the list of available Waypoints within the selected Mission as shown in the figure above. The user can now rearrange the list, rename Waypoints, add Tasks to the Waypoints, and modify the final heading and/or tolerance of each Waypoint. The user can also rename the mission and apply Tasks to when the Mission starts and stops.
Rename Mission
To rename the Mission click the Mission name as it appears in the upper left hand corner. This should change the text into an input box that can then be modified. Press enter/click aside to save the change.
Mission ID
To help facilitate API usage the user can copy the mission's UUID from this section to then put in a script or an API call.
Mission Tasks
A Mission can have Tasks assigned to when it starts and when it stops. These Tasks will run in the order they are listed in and will always run whenever the Mission starts or stops.
Rearrange List of Waypoints
Waypoints can be rearranged in order of operation in the list. To do this, enable the "Waypoints Panel" toggle to access the list of Waypoints. Here, the user will be able to drag and drop the Waypoints to reorder them.
Rename Waypoint
By default, once Waypoints are created they are assigned a default name which is the word "Waypoint" followed by a numeric value representing the the number of Waypoints that have been created plus one. The user has the option to rename these Waypoints in order for them to have more descriptive meaning.
To rename a Waypoint follow these steps:
- Enable the "Waypoint Panel" toggle. See Waypoint Panel for further details.
- Click the name of the Waypoint which the user wants to rename.
- Erase the current name and type the new name.
Add Task to Waypoint
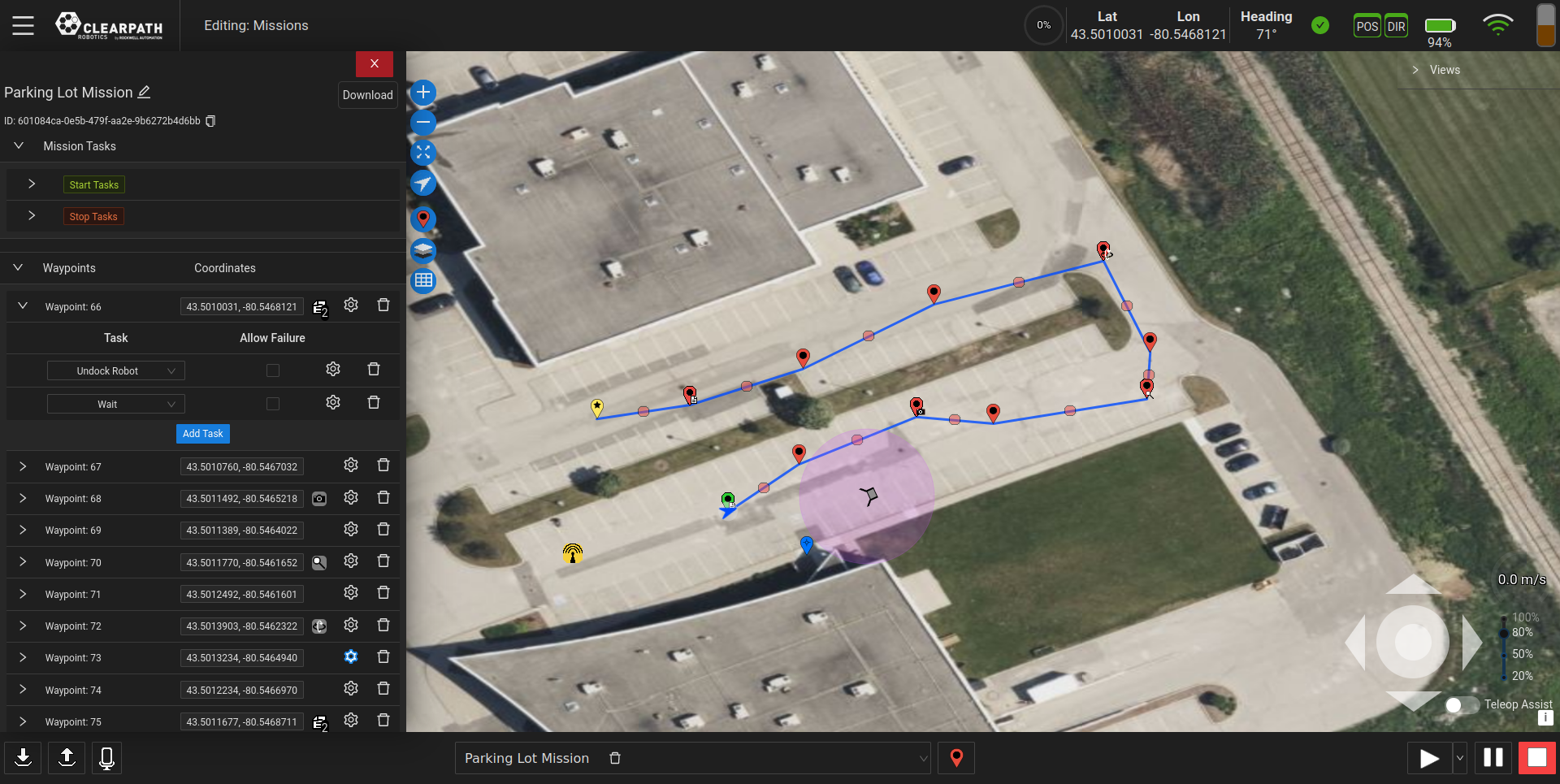
To add a Task to the end of a Mission:
-
Click the "+" icon (beside the Gear icon) in the Waypoint Row the Task is to be added to.
-
Click the "Add Task" Button that has appeared.
-
Select the Task from the dropdown list. Standard waypoint icons will be replaced accordingly depending on the task selected (waypoint icons will keep the colours assigned to them based on placement). Waypoints in the table will also have a small icon to indicate if tasks are assigned to the Waypoint accordingly.
-
The check box next to the Task name controls mission behaviour in the event that the Task fails. If the checkbox is checked the Mission will proceed to the next step in it's process, such as the next task or navigating to the next Waypoint. If its not checked, the Mission will become cancelled upon the Task's failure.
-
Click the Gear icon next to the selected Task to add the required Settings.
noteIf a waypoint has more than one task assigned to it, the icon will be replaced with

Advanced Settings
Waypoint Heading
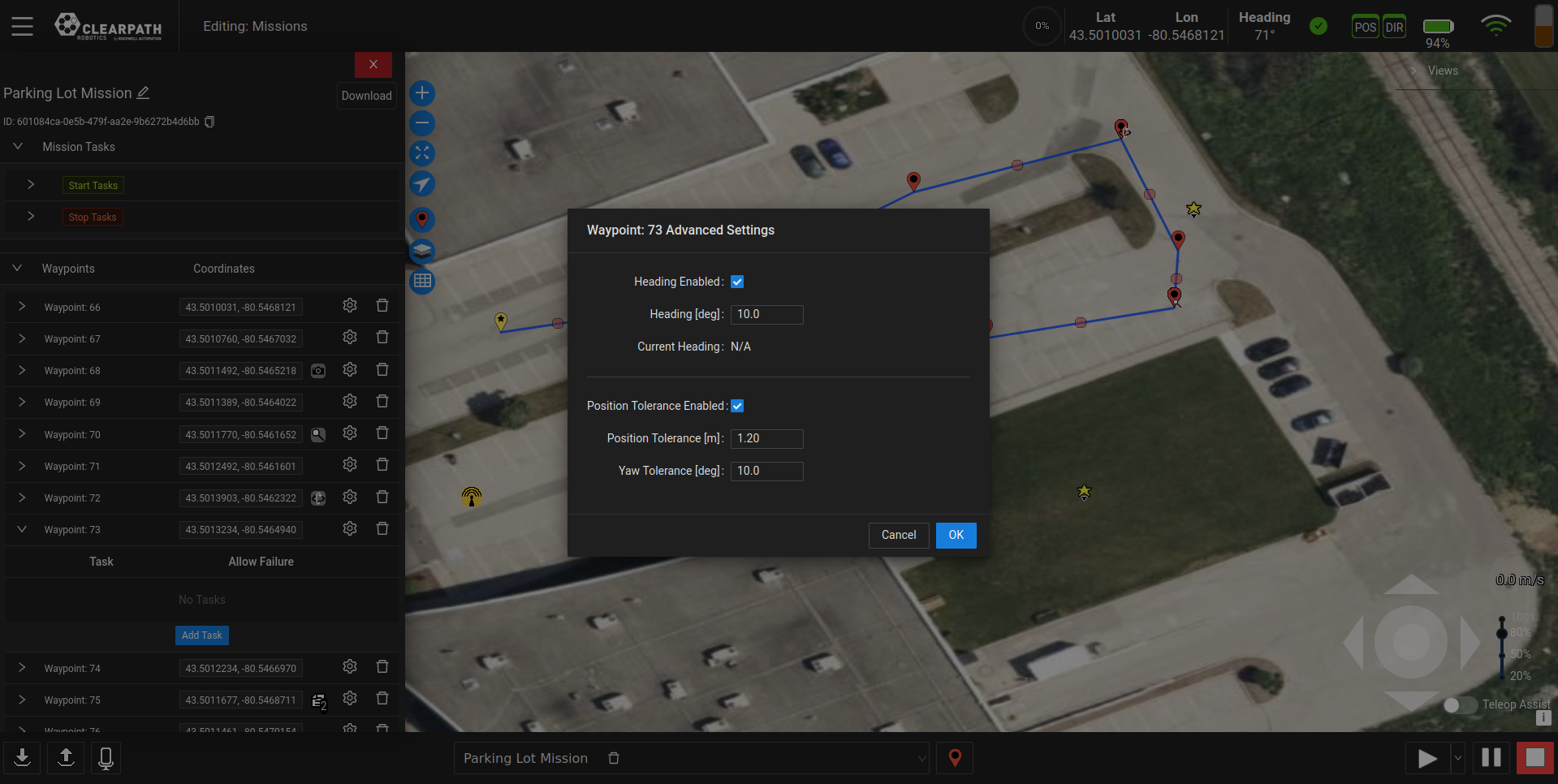
When creating a Waypoint, the user has the option of setting a final heading for the Waypoint. For example, when creating a Waypoint at an inspection point, the user may want the UGV to navigate and stop facing a certain direction. In Waypoint Panel, the list of Waypoints can be seen and the advanced settings of each Waypoint can be accessed by clicking the "Gear" icon.
To set the Waypoint's final heading, the user will need to check the "Final Heading Enabled" checkbox and enter the heading value in degrees. The heading indicator on the top bar can be used to help set this value. See the figure below showing the advanced settings.
Waypoints that have a heading or tolerance assigned to them will show a different colour on their settings icon.
The heading that has been entered will only be applied to the Waypoint (ie. the robot will only align itself with the correct heading at the Waypoint). If the robot is required to be at specific headings at other Waypoints the user will need to enter these in for each specific Waypoint.
Waypoint Tolerance
When creating a Mission, the user has the option of setting a specific tolerance for each Waypoint. By default, the Waypoint position and orientation tolerances are 0.3 meters and 180°, respectively. If a specific Waypoint requires that the tolerances be either increased or decreased, these values can be modified in the advanced settings. For example, if it's required that the position and/or orientation at a Waypoint be very accurate, such as 0.1 meters position and 5° orientation, or looser at 1.0 meter position, this can be done within these settings.
In Waypoint Panel, the list of waypoints can be seen and the advanced settings of each Waypoint can be accessed by clicking the "Gear" icon. To set the Waypoint's tolerance, the user will need to check the "Waypoint Tolerance Enabled" checkbox and enter the position and orientation values, in meters and degrees, respectively.
Constrained Replanning
If a constrained/drivable path is set the user can visualize this path by using the layers view. The purpose of this area is to help ensure that the UGV does not deviate too far from the planned route.
If the UGV is manually driven outside of the constrained replanning area while a Mission is running, the Mission will not be able to be resumed until the UGV is returned within the navigable area defined by the path contraint.
Mission Execution
Start Mission
There are multiple ways to start a Mission. At the bottom of the UI, the user has the ability to start the currently
selected Mission by clicking the "Play" button  .
Starting the Mission this will start the Mission from the first Waypoint. The user may also select the drop down next to the button
to start the Mission from the current UGV position. This is a useful way to start a Mission in the event that the UGV was blocked by
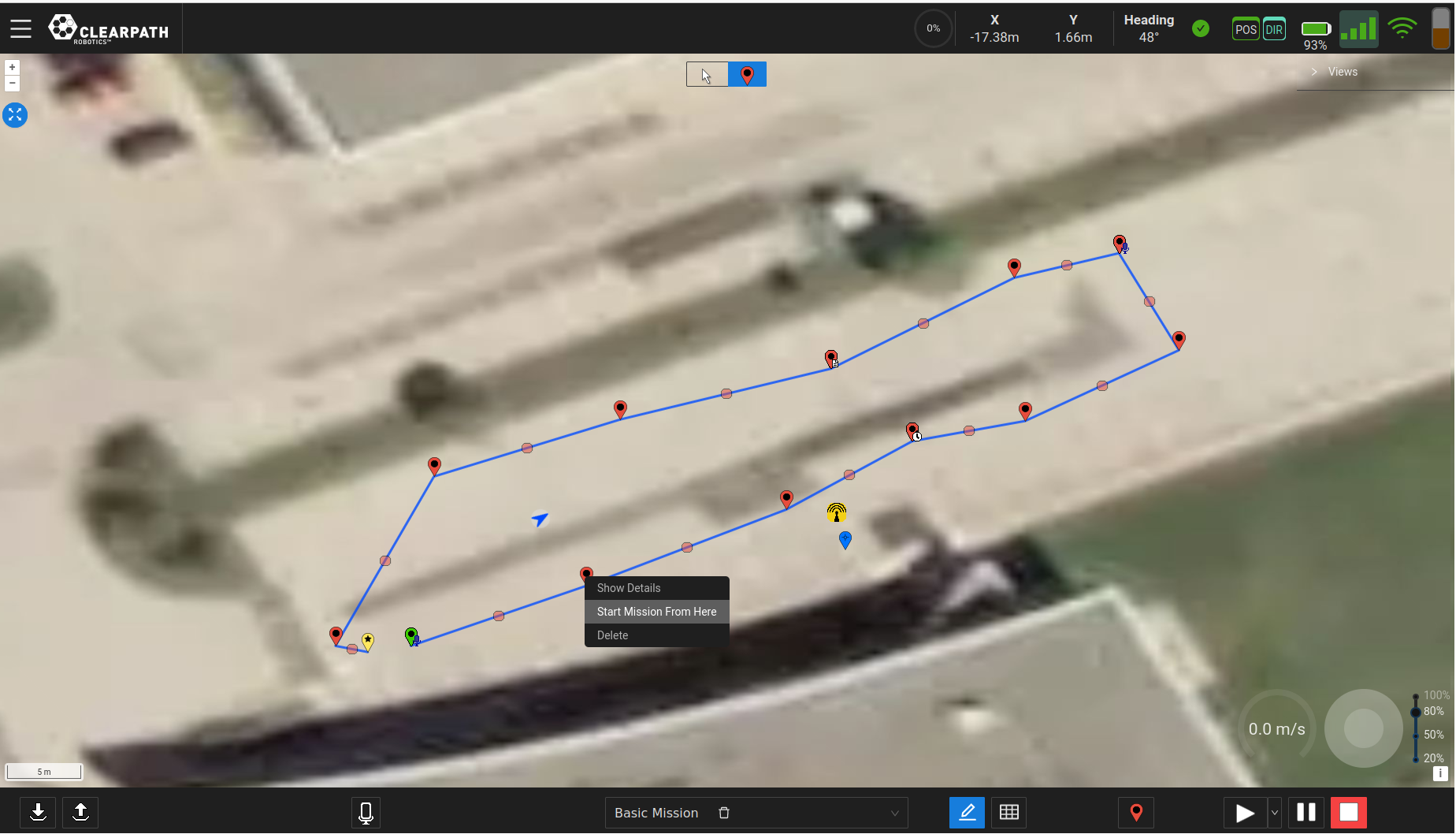
obstacles that were later moved. Another way that a user can start a Mission is by selecting a waypoint in edit mode and then clicking on
"Start Mission from Here" option. If the UGV is within 3 metres of that Waypoint the Mission will start from there.
.
Starting the Mission this will start the Mission from the first Waypoint. The user may also select the drop down next to the button
to start the Mission from the current UGV position. This is a useful way to start a Mission in the event that the UGV was blocked by
obstacles that were later moved. Another way that a user can start a Mission is by selecting a waypoint in edit mode and then clicking on
"Start Mission from Here" option. If the UGV is within 3 metres of that Waypoint the Mission will start from there.
When the Mission has been started the Play button will turn green, regardless of how it has been started.
Pause Mission
At the bottom of the UI, the user has the ability to pause the currently
running mission by clicking the "Pause" button  . When the
mission has been paused this button will turn yellow. Pausing a mission
allows the user to take time to look around with the camera or to
teleoperate the UGV to a nearby location to perform an inspection. For
ease of operation, the user must PAUSE the active mission if the user
wants to teleoperate the UGV.
. When the
mission has been paused this button will turn yellow. Pausing a mission
allows the user to take time to look around with the camera or to
teleoperate the UGV to a nearby location to perform an inspection. For
ease of operation, the user must PAUSE the active mission if the user
wants to teleoperate the UGV.
Cancel Mission/Task
At the bottom of the UI, the user has the ability to stop the currently
running mission or task by clicking the "Stop" button  . When the
mission/task has been cancelled this button will turn red. The name of
the mission/task will be shown to be cancelled in the feedback bar.
. When the
mission/task has been cancelled this button will turn red. The name of
the mission/task will be shown to be cancelled in the feedback bar.