ROS 2 Networking
Overview
The Clearpath robot packages currently support eProsima Fast DDS as the ROS Middleware (RMW) Implementation. This middleware has two supported options for ROS 2 node discovery, Simple Discovery and Discovery Server. Each of these discovery mechanisms has their own use case:
Simple Discovery
- Default, does not require manual setup
- Generally operates on the basis that any ROS 2 devices on the network should be discoverable and connect automatically
- Requires multicasting on the network (may be restricted on school or corporate networks)
- Good for simple systems (small number of nodes on a dedicated local network)
Discovery Server
- Requires manual configuration in the
robot.yaml - Generally operates on the basis that ROS 2 networks should be controlled and should only discover other nodes as needed
- Does not require multicasting (more likely to work on school or corporate networks)
How Discovery Works
Simple Discovery
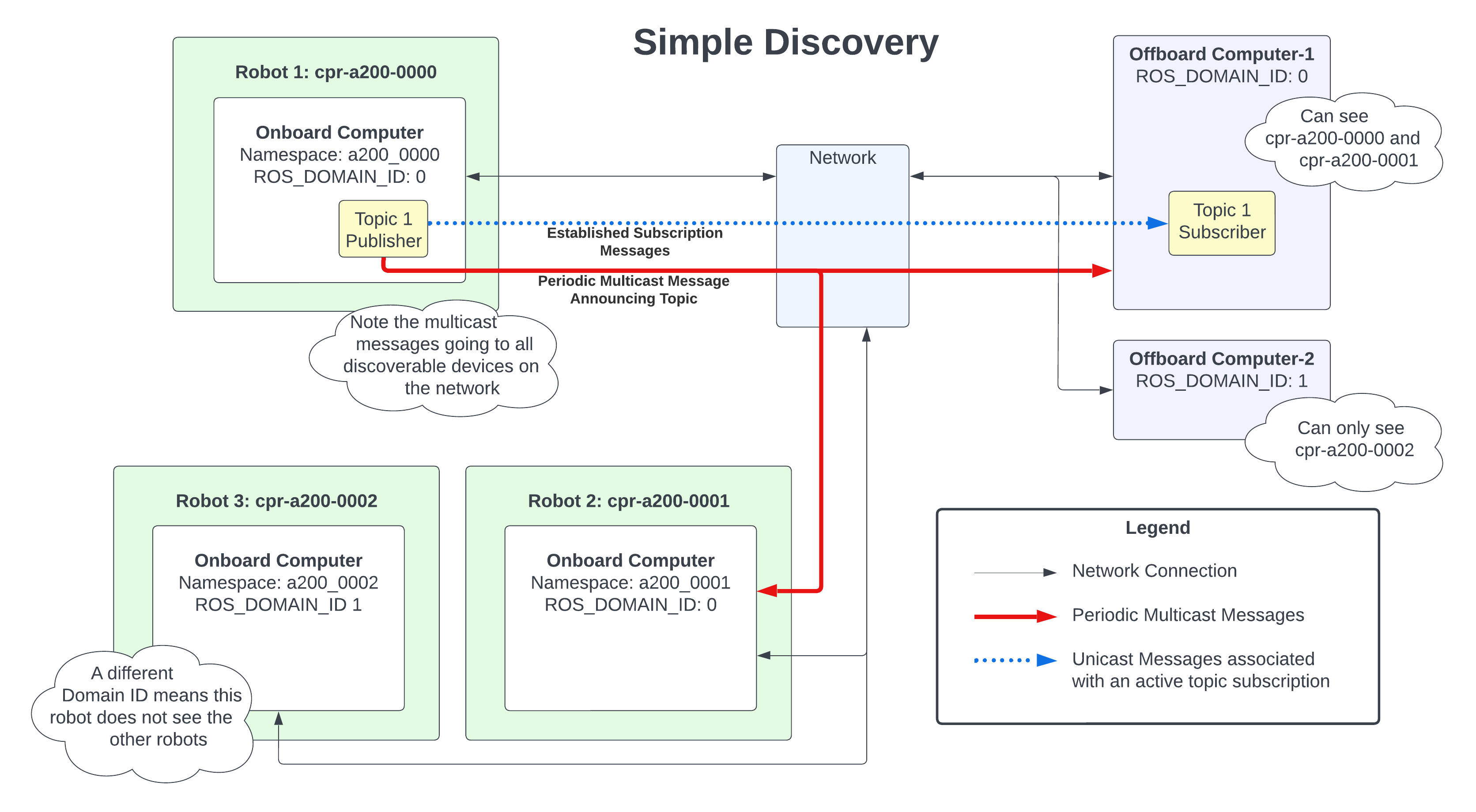
Participants (nodes) send periodic multicast announcement messages over the network with their unicast addresses, and then all participants share discovery information (such as topics, and action servers.) with all other participants. This means that all participants get information about all other participants irrelevant of whether or not they need that information.
The following diagram depicts three Husky A200's set up with simple discovery and illustrates how different combinations of settings work. The robot type is not important, and the same diagram can be made for any combination of Clearpath robots.
For more detailed information regarding Fast DDS or simple discovery, visit the eProsima Fast DDS documentation.
Additional details on how to select simple disocvery in the robot.yaml config file are available in the
Middleware section of Robot Configuration.
Discovery Server
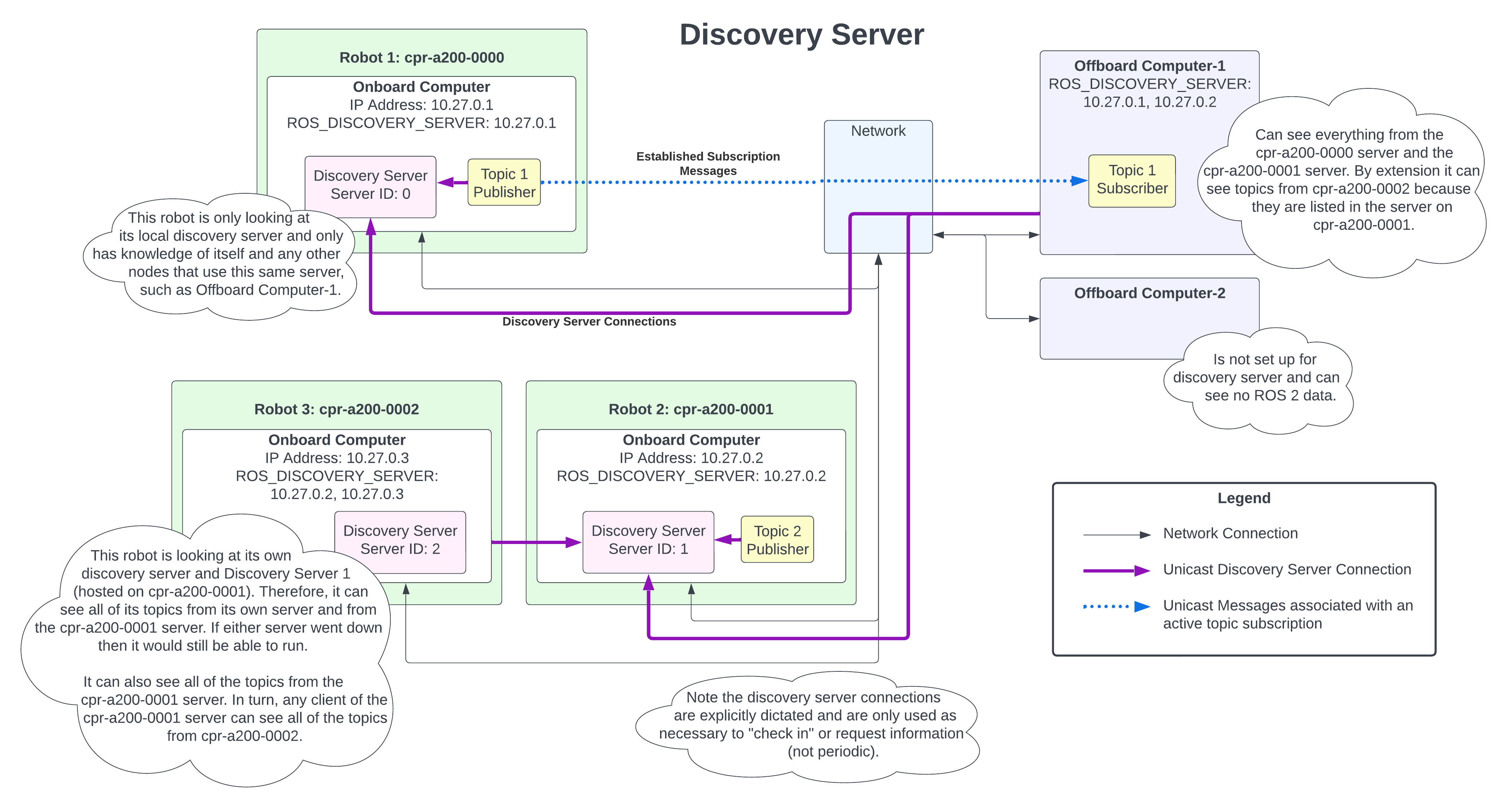
A discovery server is a process running on a computer that serves to record and report ROS discovery information. A server can be thought of as a look up table for ROS discovery information. When a participant (node) starts, it checks in with the servers to share its discovery information and request what information it is looking for. In this way, particpants only get discovery information and establish communication as necessary. A participant does not know all of the information that is available, only where to find the fellow participants that it needs.
There can be multiple servers in a given system. These can be used for redundancy or to segregate information.
The following diagram depicts three Husky A200's set up with discovery server and illustrates how different
combinations of settings work. The ROS_DISCOVERY_SERVER environment variable indicates which discovery servers
a given robot should communicate with. The robot type is not important and the same diagram can be made for any
combination of Clearpath robots.
For more detailed information regarding Fast DDS or discovery server, visit the eProsima Fast DDS documentation.
Choosing a Configuration
The first decision is choosing between simple discovery and discovery server. If simple discovery works for you then there is no need to change from the default operation. Simple discovery generally allows for any ROS 2 and Fast DDS enabled device running the default settings to connect to the system with no additional configuration.
If you want to run multiple independent simple discovery systems on the same network, you can segregate them by using different ROS Domain IDs.
You may want or need to switch to discovery server for any of the following reasons:
- If your network does not support multicasting (often true on school or corporate networks)
- If you have a large system (several robots or an excess number of nodes/topics)
- If you want to control which devices have access to which information
- If you have a weak network (for example in cases of long range wireless connection)
Certain networks (such as school or corporate networks) may have additional restrictions that prevent even ROS 2 with discovery server from operating. In these situations consider meeting with the IT group or the network administrator to determine if ROS 2 is allowed to run on that network or if you can run the system on a separate dedicated network.
Discovery Server Configurations
There are multiple different ways to configure discovery server depending on which ROS 2 devices need to connect.
This section will go over some basic configurations and is generalized for use as an introduction. It does not
describe all possible configurations. The ROS_DISCOVERY_SERVER environment variable, shown in the various diagrams,
indicates which discovery servers a given robot is connected to. Additionally, communication will be referred to
in terms of seeing ROS 2 topics although this is representative of all nodes, topics, action servers, and so on.
For all configurations, it is very important for all discovery servers in the system to be included in the servers
list in the robot.yaml config. This is because each discovery server must have a unique ID number which
is used both to launch the server and to connect to the server. This ID is automatically assigned by the Clearpath
packages.
1. Fully Connected
This configuration is the simplest to set up using the robot.yaml config. It allows all robots to operate
independently but also allows any ROS 2 device in the system to see all of the topics from all of the
ROS 2 devices. This is done by having a local discovery server on each robot and pointing each ROS 2 device
in the system at all of the discovery servers in the system.
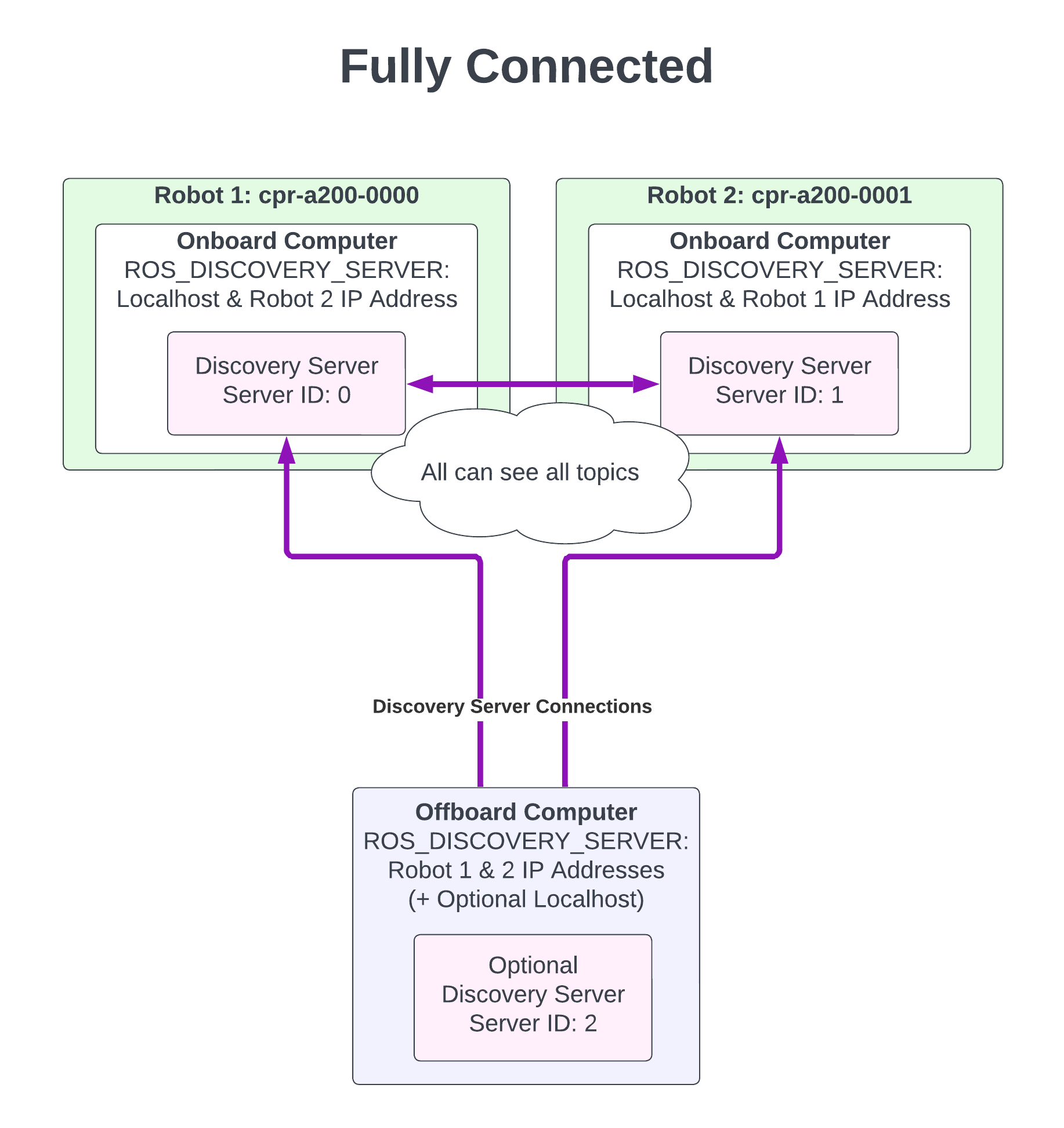
This configuration is achieved by listing all of the computers' hostnames in the
servers section on all of the robots. Including the offboard computer allows
the offboard computer to also have a discovery server running and thus operate independently from the robots as
well as communicating with all of the robots. However, the discovery server must also be set up separately on the
offboard computer (only required to allow the offboard computer to run ROS 2 nodes independently from the robots).
The middleware section for the system in the diagram would look like the following on all devices:
middleware:
implementation: rmw_fastrtps_cpp
discovery: server
servers:
- hostname: cpr-a200-0000
- hostname: cpr-a200-0001
- hostname: offboard-computer
Additional details on the available fields for the robot.yaml config file are available in the
Middleware section of Robot Configuration.
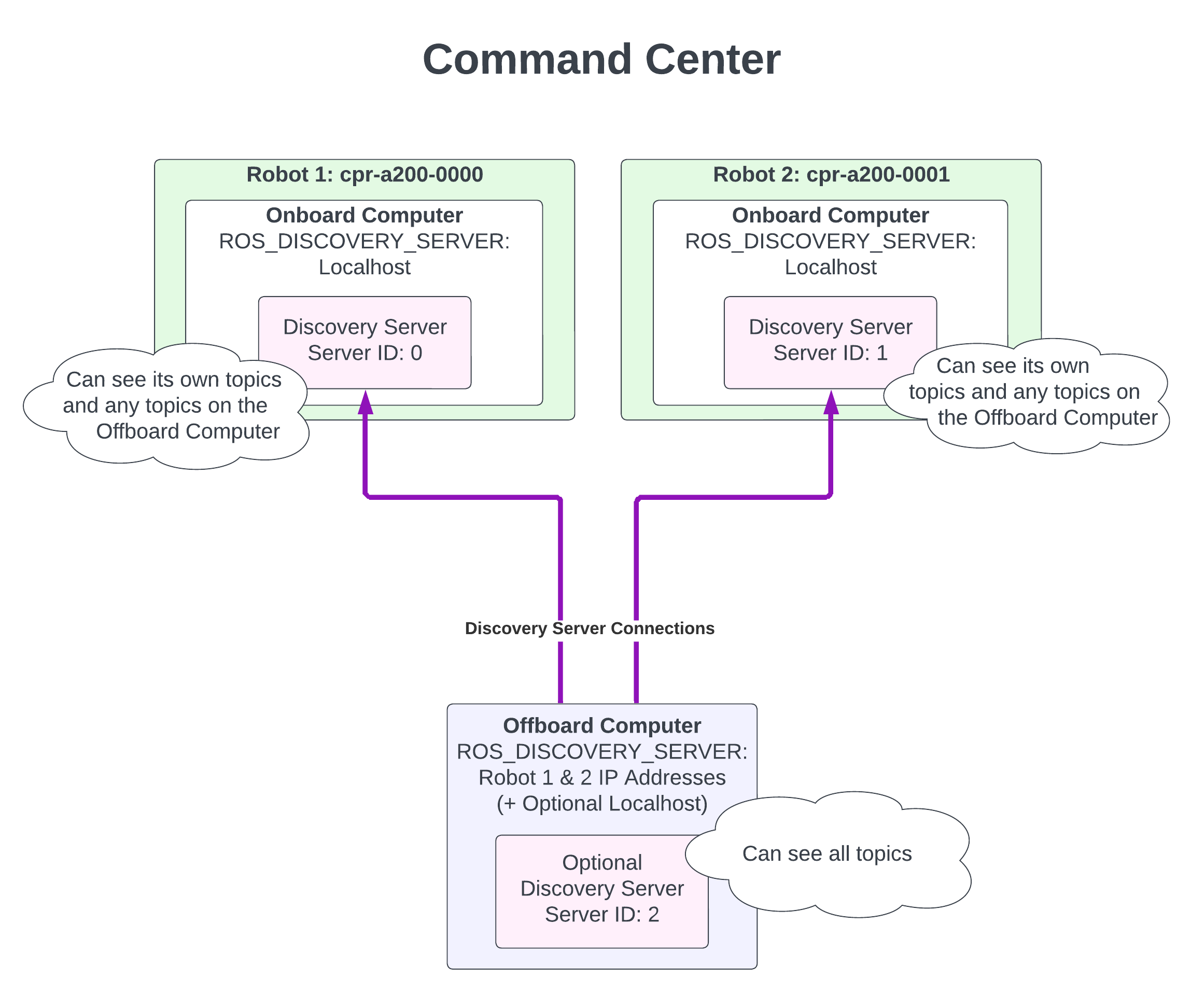
2. Command Center
In this configuration you have many robots that each operate independently and an offboard computer that checks in and communicates with each of the robots. Each of the robots will have and refer to their own local discovery server. This allows the onboard ROS 2 nodes to communicate without any external network connection. The offboard computer will be pointed at the discovery servers on each and every robot. This will allow the offboard computer to see all of the topics on all of the robots at the same time. In turn, each of the robots will be able to see all of the topics launched on the offboard computer. Including a discovery server on the offboard computer as well allows it to run ROS 2 nodes independently from the robots.
The key difference between this configuration and the fully connected configuration is that the robots cannot communicate with each other. This may be beneficial if the network is weak, or if there is an excess number of robots.
This configuration is achieved by listing all of the computers' hostnames in the
servers section on all of the robots but setting enabled to False for
every server entry except for that specific robot. This tells the robot to only use its own discovery server.
The offboard computer should have all of the servers enabled, telling it to connect to all discovery servers in the system.
This servers list must include the offboard computer if a discovery server is being run on the offboard computer. However, the discovery
server must also be set up separately on the offboard computer.
The middleware section of the config for the system in the diagram would look like the following for cpr-a200-0000:
middleware:
implementation: rmw_fastrtps_cpp
discovery: server
servers:
- hostname: cpr-a200-0000
- hostname: cpr-a200-0001
enabled: False
- hostname: offboard-computer
enabled: False
It would look like the following for cpr-a200-0001:
middleware:
implementation: rmw_fastrtps_cpp
discovery: server
servers:
- hostname: cpr-a200-0000
enabled: False
- hostname: cpr-a200-0001
- hostname: offboard-computer
enabled: False
And the following for the offboard computer:
middleware:
implementation: rmw_fastrtps_cpp
discovery: server
servers:
- hostname: cpr-a200-0000
- hostname: cpr-a200-0001
- hostname: offboard-computer
Additional details on the available fields for the robot.yaml config file are available in the
Middleware section of Robot Configuration.
Offboard Computer Setup
Use the robot.yaml from one of the robots in order to set up the offboard computer. The servers list must include all of
the discovery servers and all of the ones that the offboard computer should be connecting with must not be disabled.
-
Regenerate the
setup.bashevery time theserverslist changes in any way (as per offboard computer install instructions) -
If a discovery server is intended to be run on the offboard computer then generate and run the discovery-server-start launch file.
To generate the launch script:
source /opt/ros/jazzy/setup.bash
ros2 run clearpath_generator_common generate_discovery_server -s ~/clearpath
To launch the server
bash -e ~/clearpath/discovery-server-start
Zenoh Router
In early 2025 a new ROS middleware implementation called Zenoh was released. For a detailed description of Zenoh, please refer to Zenoh's design document.
Zenoh is only available on ROS 2 Jazzy and later; it cannot be used on ROS 2 Humble.
Starting the Zenoh Router
To manually launch the Zenoh router run
bash -e ~/clearpath/zenoh-router-start
This process can also be daemonized and launched via the systemctl command:
source /opt/ros/jazzy/setup.bash
sudo systemctl start clearpath-zenoh-router