Jackal Maintenance

Software Maintenance
Getting New Packages
If you are upgrading your robot from an older version of ROS, please refer to our upgrade instructions for upgrading to Melodic, Noetic and ROS 2 Humble.
Clearpath Robotics robots are always being improved, both its own software and the many community ROS packages upon which it depends!
You can use the apt package management system to receive new versions all software running on the platform.
Each robot leaves the factory already configured to pull packages from http://packages.ros.org as well as http://packages.clearpathrobotics.com. To update your package and download new package versions, simply run:
sudo apt-get update
sudo apt-get dist-upgrade
MCU Firmware Update
When you update packages, there is periodically a new version of Jackal's firmware available. You can check by running:
sudo apt update
sudo apt search ros-humble-jackal-firmware
If new firmware is available, follow the procedure below to flash it to Jackal's MCU:
Jackal's MCU is mounted to the rear inside wall of the robot. To access it, open the lid, keeping the computer tray secured to the underside of the lid.
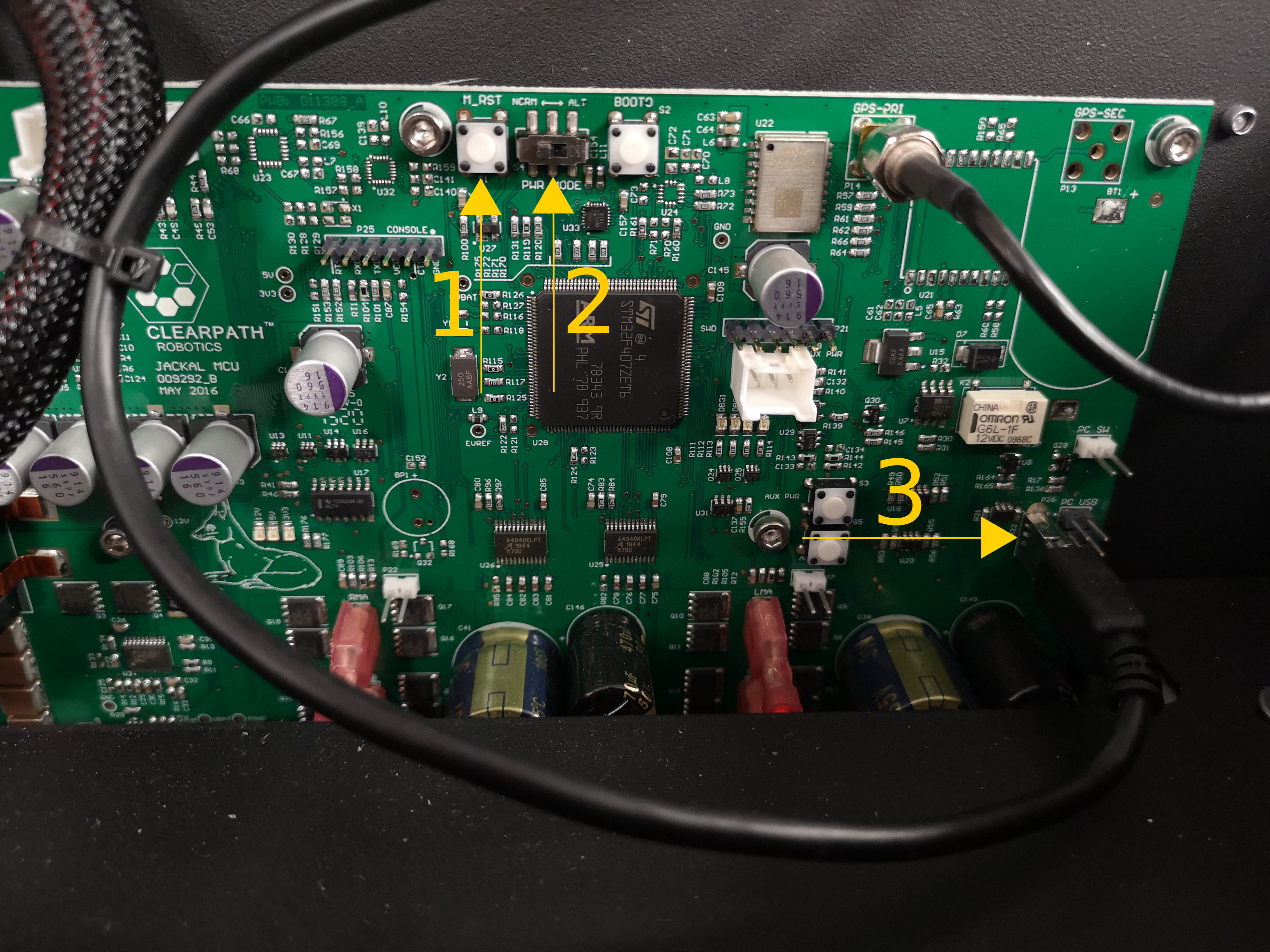
- The
M_RSTbutton, used to reset the MCU. - The MCU mode switch. Left is
NORMor normal mode, right isALTused for flashing the firmware. - The mini-USB port used for transmitting data. This should be connected to Jackal's computer for both normal operation and firmware flashing.
Jackal firmware can be flashed from the Jackal's computer.
1. Download the Jackal Firmware package from the Clearpath package server
sudo apt-get update
sudo apt-get install ros-humble-jackal-firmware
2. Prepare the Robot
Place Jackal up on blocks. Firmware loading does not usually result in unintended motion, but it's safest when
off the ground.
Open the lid of the robot to expose the MCU and connect the mini-USB cable (3 in the image above).
3. Place the Jackal MCU into bootloader mode
Switch the PWR_MODE switch (2 in the image above) from NORM to ALT. If the robot is on, press the M_RST button. Otherwise, turn the
robot on with the power button.
4. Flash the firmware
jackal_firmware_flash.sh
Flashing progress will be indicated by the flash script. Wait for the firmware to finish flashing.
Do not turn the robot off or unplug the mini-USB cable while flashing firmware. If an error occurs while
flashing, you can attempt to run jackal_firmware_flash.sh again.
4. Place the Jackal MCU into normal mode
Once the firmware has been flashed, place the Jackal MCU back into normal mode by switching the PWRMODE switch from _ALT to NORM. The robot will power off. Turn the robot back on by pressing the power button.
Jackal will now be using the new firmware you installed.
Support
Clearpath is committed to your success. Please get in touch with us and we will do our best to get you rolling again quickly: support@clearpathrobotics.com.
To get in touch with a salesperson regarding Clearpath Robotics products, please email research-sales@clearpathrobotics.com.
If you have an issue that is specifically about ROS and is something which may be of interest to the broader community, consider asking it on https://robotics.stackexchange.com. If you do not get a satisfactory response, please ping us and include a link to your question as posted there. If appropriate, we will answer in the ROS Answers context for the benefit of the community.