IndoorNav Software Overview
This section will explain the basic usage of IndoorNav. For more complete documentation, and a deeper dive into all of the available features, please refer to the guides at http://docs.ottomotors.com.
The following figure shows the basic layout of the networking for IndoorNav.
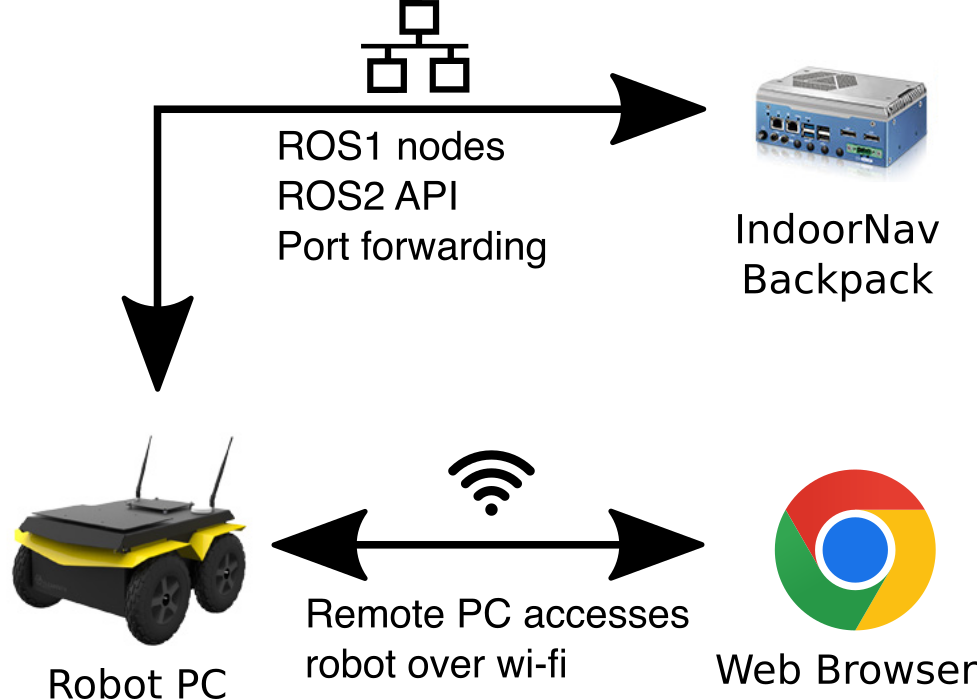
The robot's main PC is located inside the robot and runs the roscore
process. All sensors are connected to the robot's main PC over USB or
ethernet, as required by the specific sensor.
The IndoorNav backpack PC communicates over an ethernet connection with the main PC. All of the localization and path-planning is done on the backpack PC. The backpack PC does not have any direct connection to the wireless network; all traffic to/from the user's web browser is routed via the robot's main PC.