Simulating Your Robot
Simulating with Gazebo
If you do not have a physical robot and physical sensors, you can
instead simulate everything using gazebo.
The Robot Customizer ROS package provides a useful .launch file for
simulation in gazebo. This file is called gazebo.launch, and can be
found
here.
To use it, simply launch gazebo.launch and provide the
description_launch argument with the path to your robot's .launch
file. For example, you can simulate the model of the example
generic_robot.urdf.xacro robot along with the SICK LMS1xx 2D laser
scanner attached to it. In terminal, run:
roslaunch cpr_robot_customizer gazebo.launch description_launch:=/home/administrator/catkin_ws/src/cpr_robot_customizer/example/description.launch
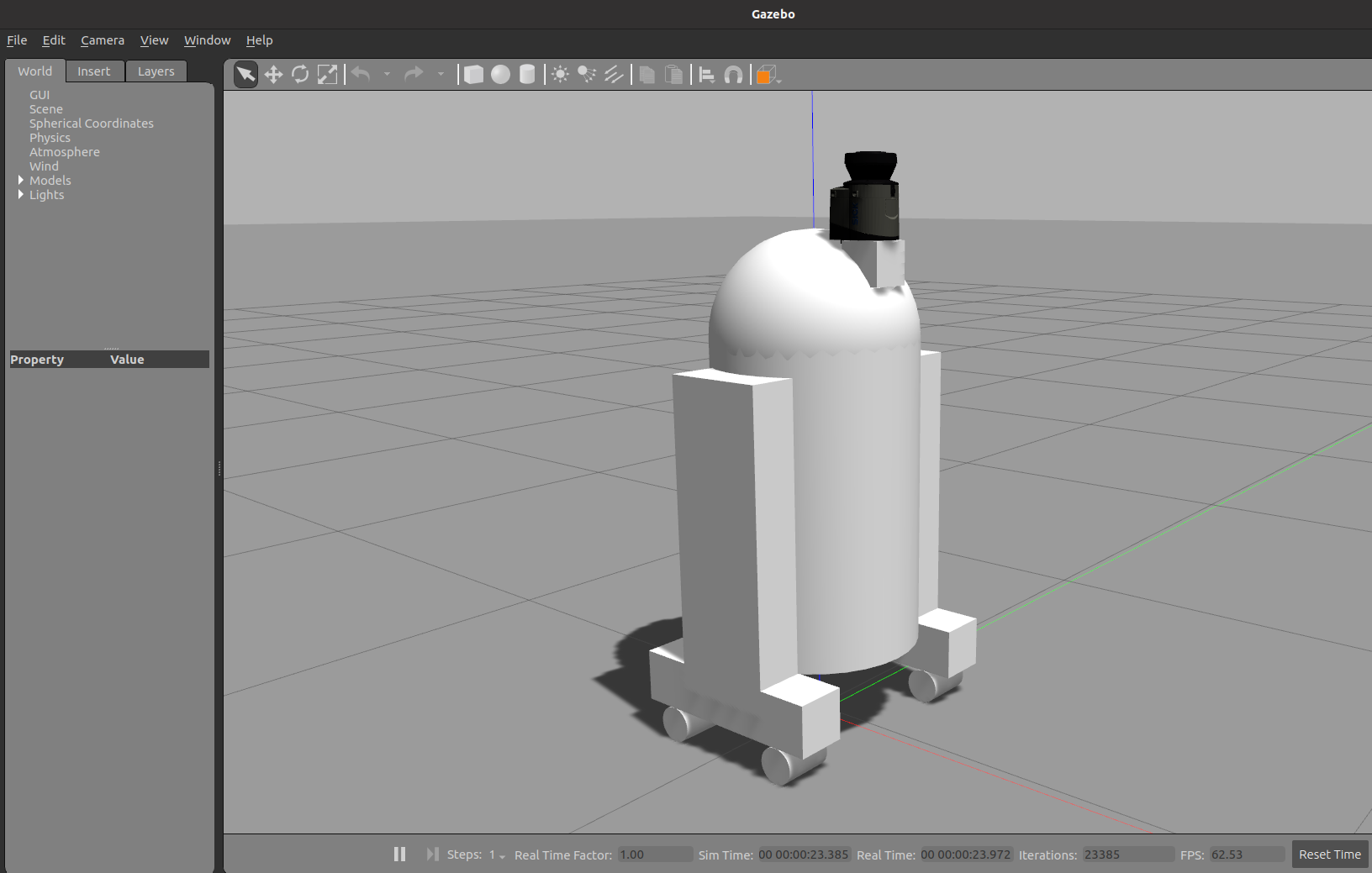
Once gazebo loads, you should see the model of the example generic
robot, along with the SICK LMS1xx 2D laser scanner mounted ontop of the
box link.